声音导引系统程序
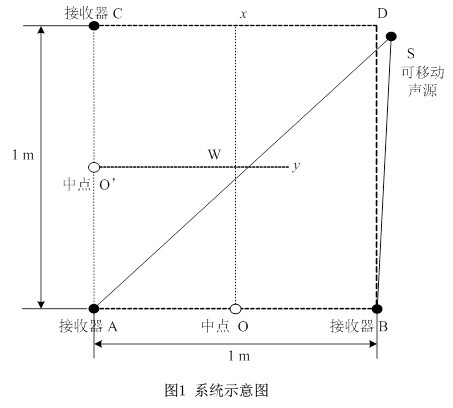
图中,AB与AC垂直,Ox是AB的中垂线,O’y是AC的中垂线,W是Ox和O’y的交点。
声音导引系统有一个可移动声源S,三个声音接收器A、B和C,声音接收器之间可以有线连接。声音接收器能利用可移动声源和接收器之间的不同距离,产生一个可移动声源离Ox线(或O’y线)的误差信号,并用无线方式将此误差信号传输至可移动声源,引导其运动。
可移动声源运动的起始点必须在Ox线右侧,位置可以任意指定。
基本要求
(1)制作可移动的声源。可移动声源产生的信号为周期性音频脉冲信号,如图2所示,声音信号频率不限,脉冲周期不限。
(2)可移动声源发出声音后开始运动,到达Ox线并停止,这段运动时间为响应时间,测量响应时间,用下列公式计算出响应的平均速度,要求平均速度大于 5cm/s。
(3)可移动声源停止后的位置与Ox线之间的距离为定位误差,定位误差小于3cm。
(4)可移动声源在运动过程中任意时刻超过Ox线左侧的距离小于5cm。
(5)可移动声源到达Ox线后,必须有明显的光和声指示。
(6)功耗低,性价比高。
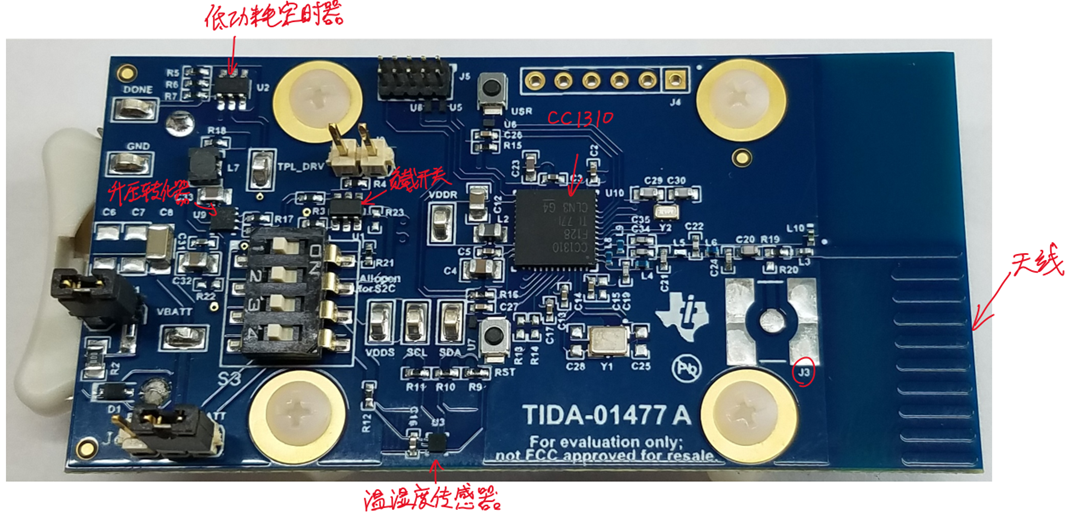
下图是小车(移动声源)
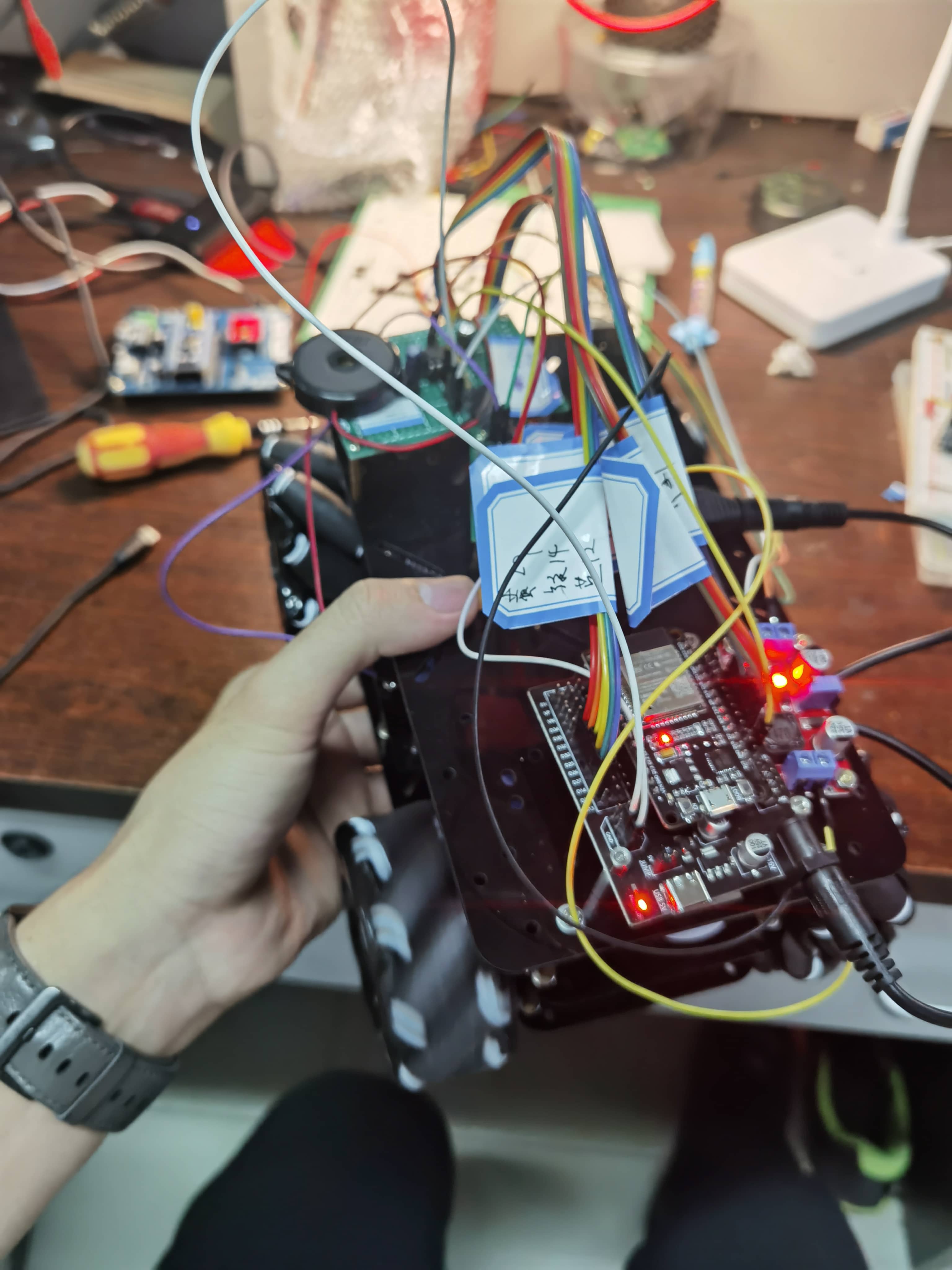
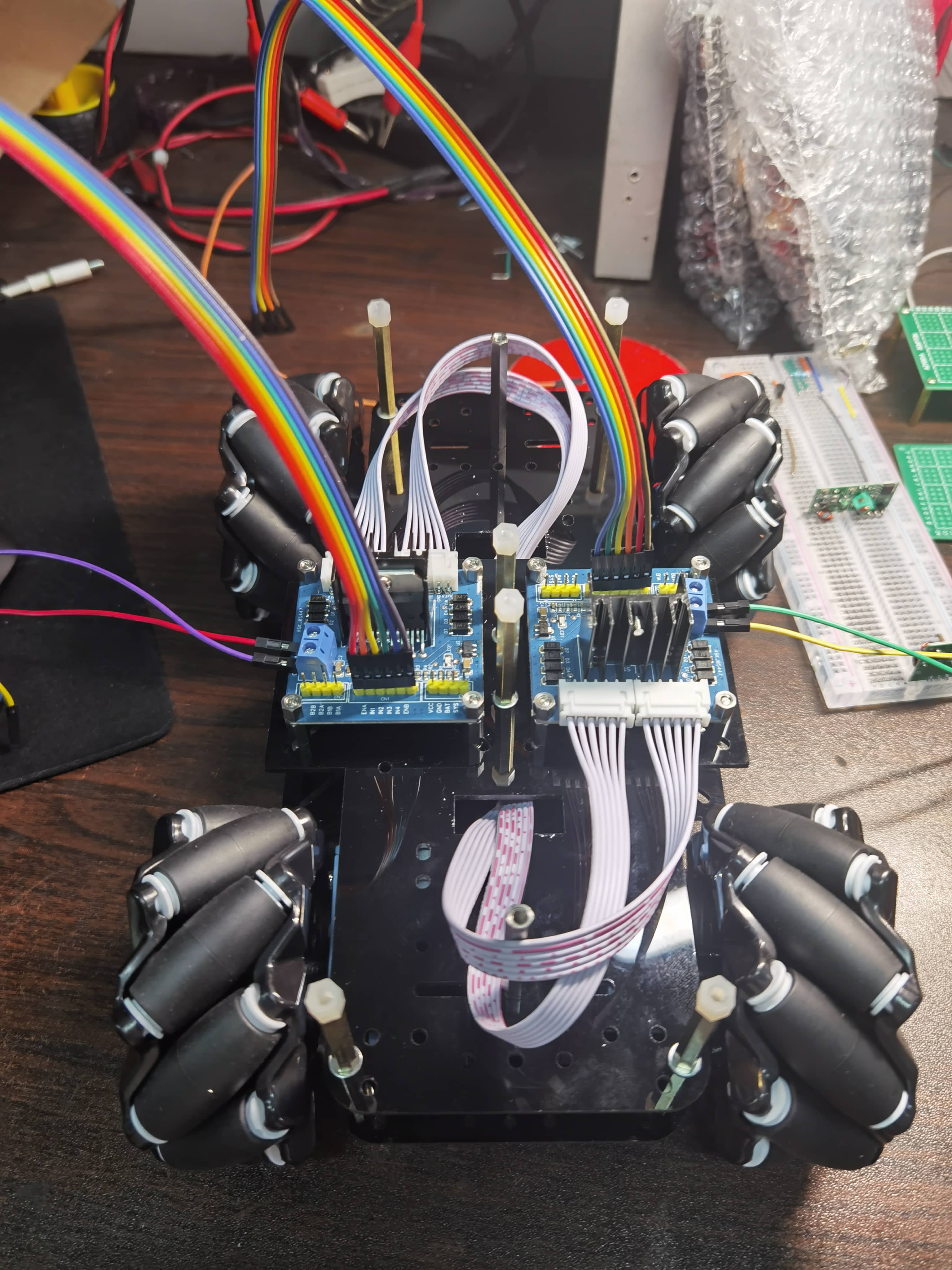
使用esp32编程,通过PWM的占空比,使用L298控制直流减速电机转速和方向,从而控制小车前后左右运动。
主要使用了esp32单片机,因为直接使用Arduino IDE编写程序,很高效方便。而且esp32单片机自带WiFi模块,可以很稳定的实现信息的发送接受。
声音放大模块:使用了扬声器和功率放大器,使其可以产生尽可能响(振幅大)的声音,一秒中的时间产生5K Hz的声波。
三个声音接受器都是自主设计的,使用了CSND,类似于stack overflow和github。这个网站上有各种工科的中文资料,如何使用二阶高通滤波电路滤除低频干扰信号(人发出的声音),获取高频信号(5 k Hz),再结合高灵敏度的小型电容式话筒将声波信号的电压模拟量信号,再通过滤波放大操作,通过专门检测的芯片输出高电平(模拟信号转换为数字信号)。通过设定esp32(接受部分模块)获取高电平信号,从而开始记录获取信号的时间,再进行运算计算出小车(声源)的位置。
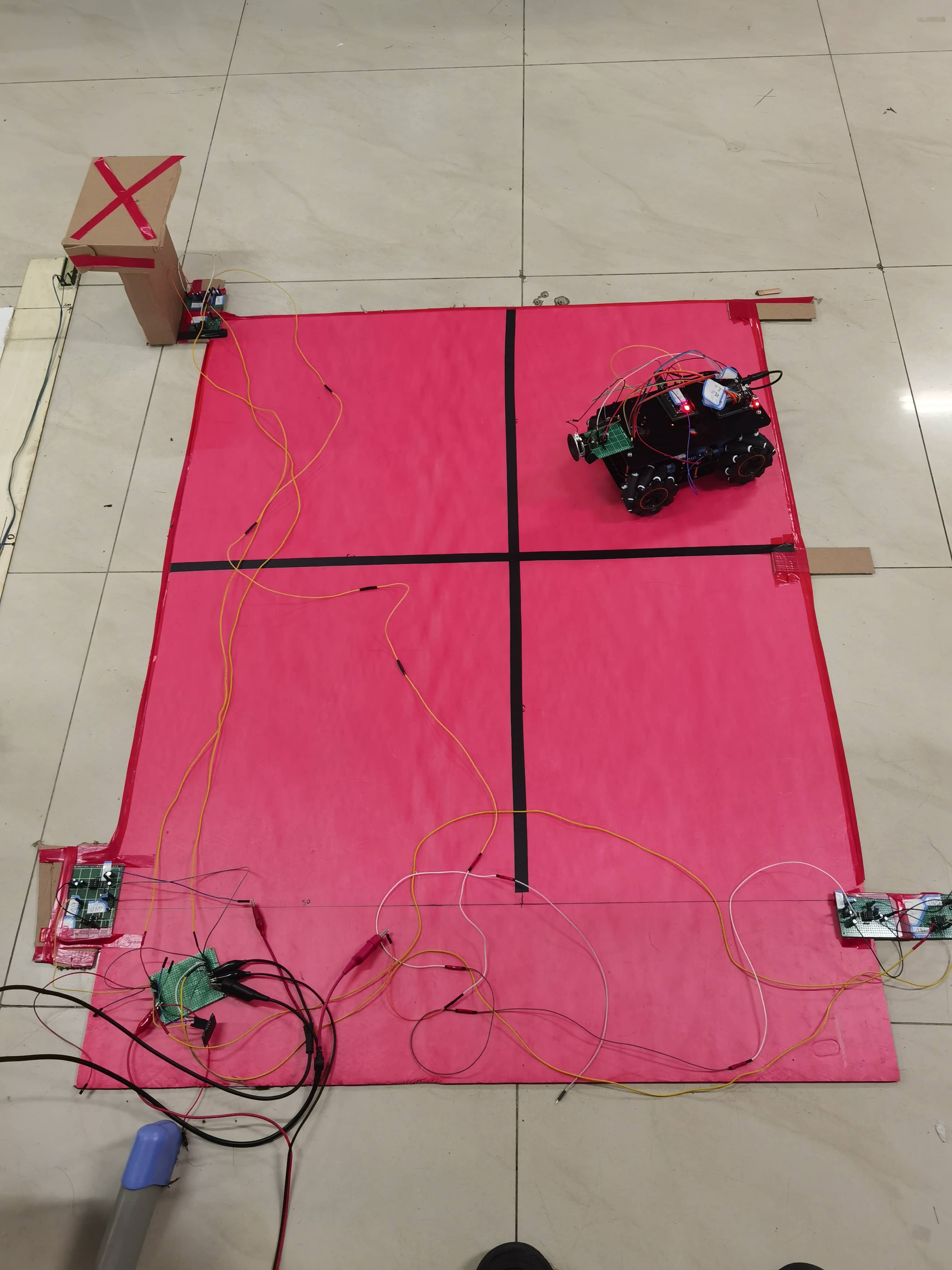

在寝室中测试系统运行情况

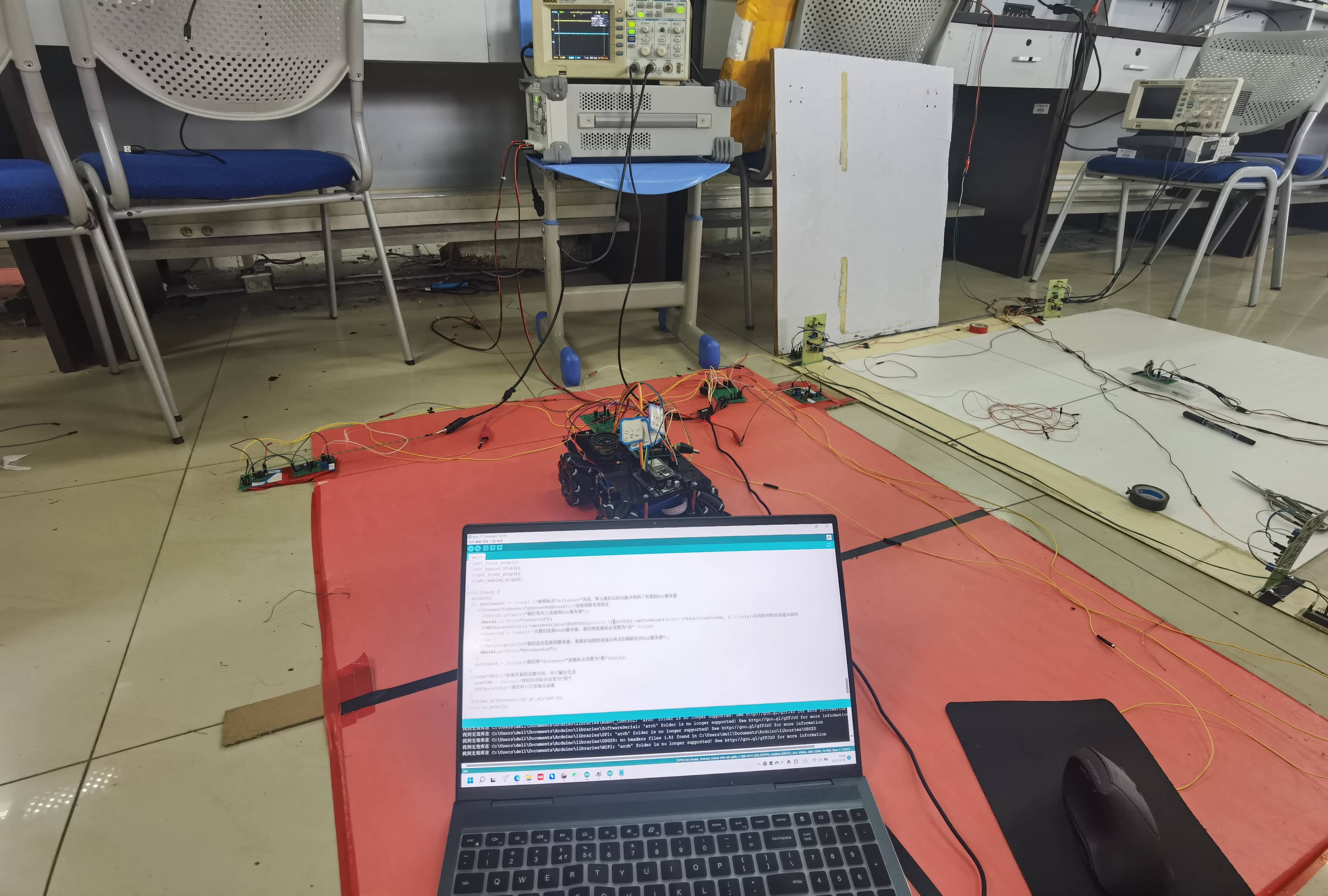
实验室测试,更加规范,马上就要验收任务了,可以看出我们模块抗干扰能力很强,其他组产生的不同于5k Hz的声波没有对我们产生任何影响。
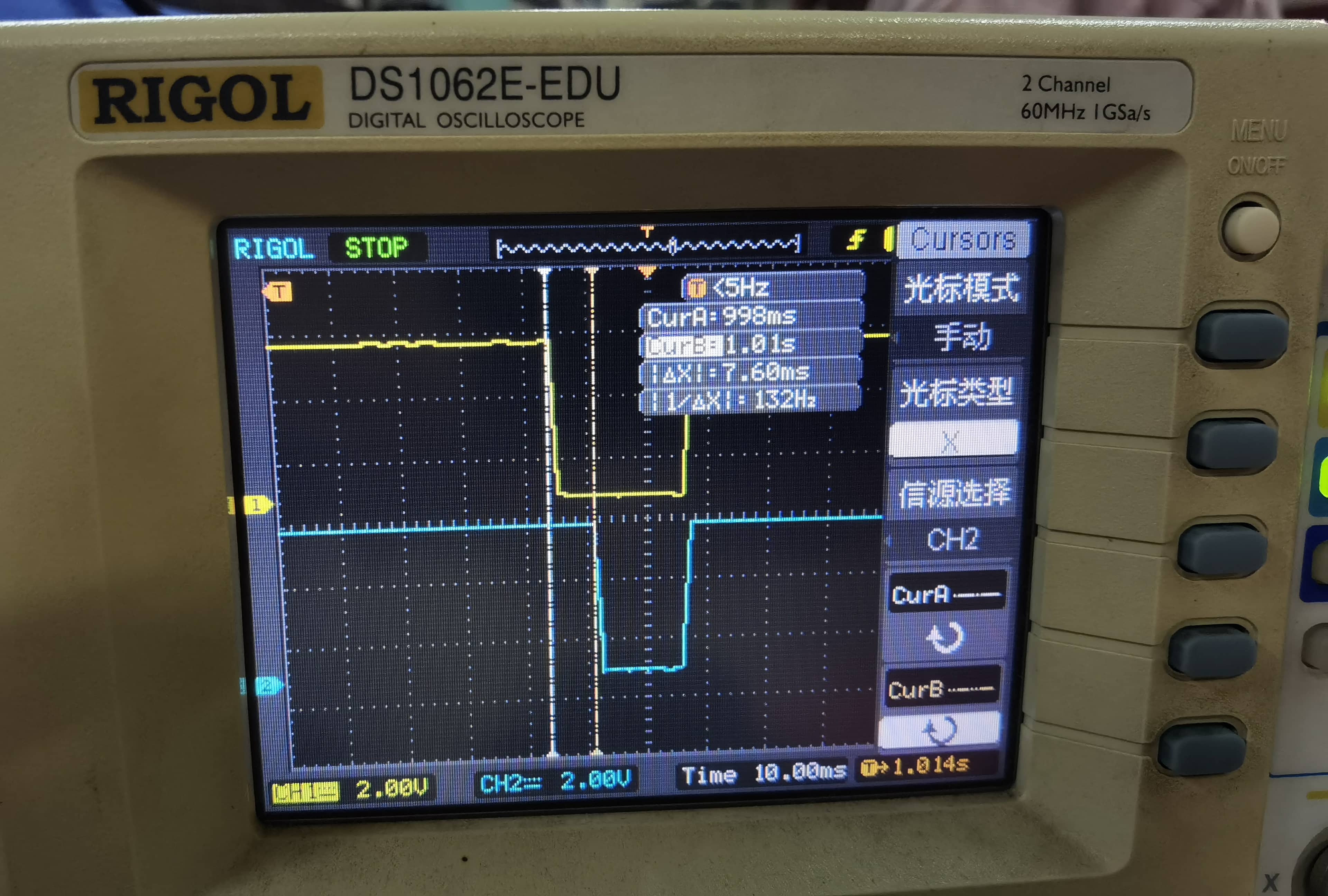
使用示波器放大两个信号的捕获到的时间差,计算小车的位置。算是使用示波器验证方案可行性。