大二阶段项目——国家级大学生创新训练计划项目《基于机器视觉和柔性末端的脐橙采摘机器人》
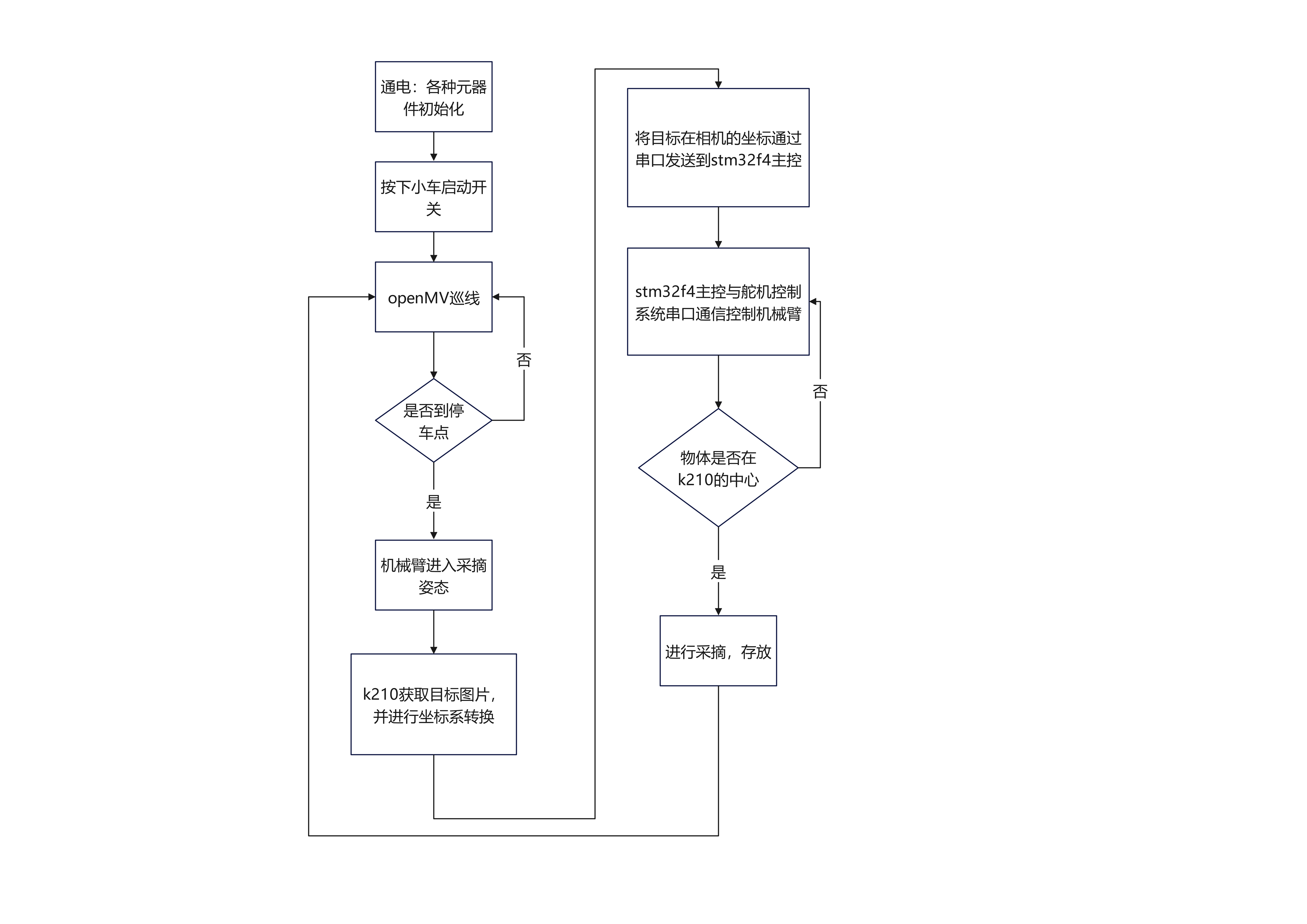
首先打开电源开关通电初始化各种元器件,再点击运行按钮,就可以通过openMV4 巡线,之后运行到相应的停车标志的位置,就停车运行相应的机械臂动作组,先观察目标的大致位置,通过摄像头模块进行运算,将大致的坐标位置给stm32f4单片机,之后单片机通过串口通信协议“#1P600#2P900#8P2500T100\r\n”控制相应的电机运动到相应的位置,实现目标的抓取。

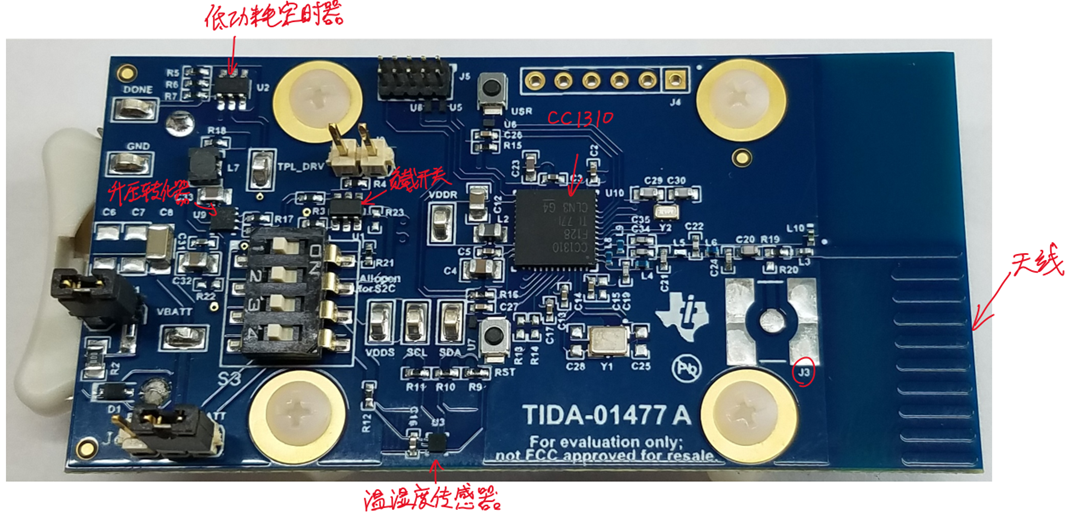
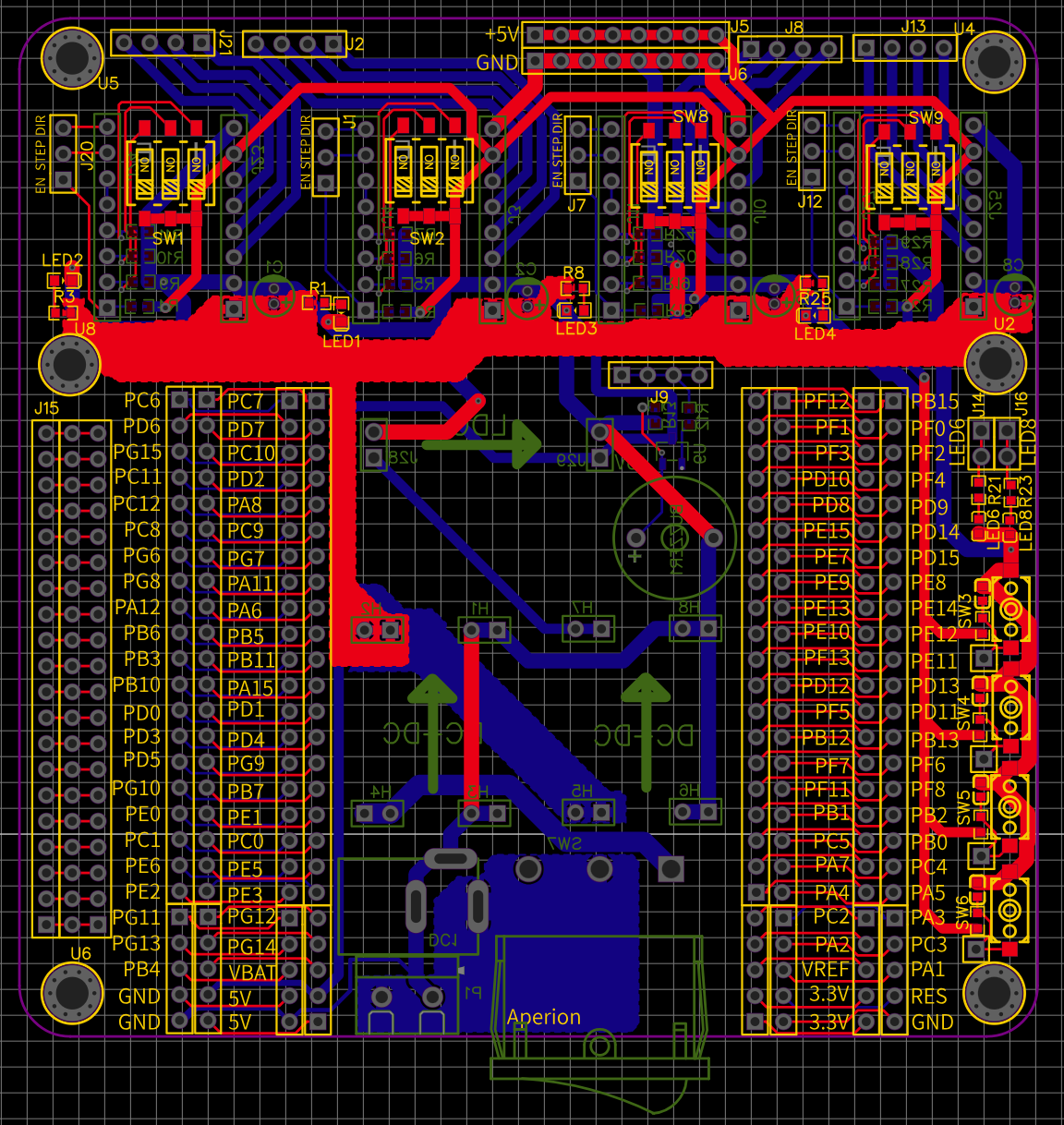
原理图和PCB
总体流程
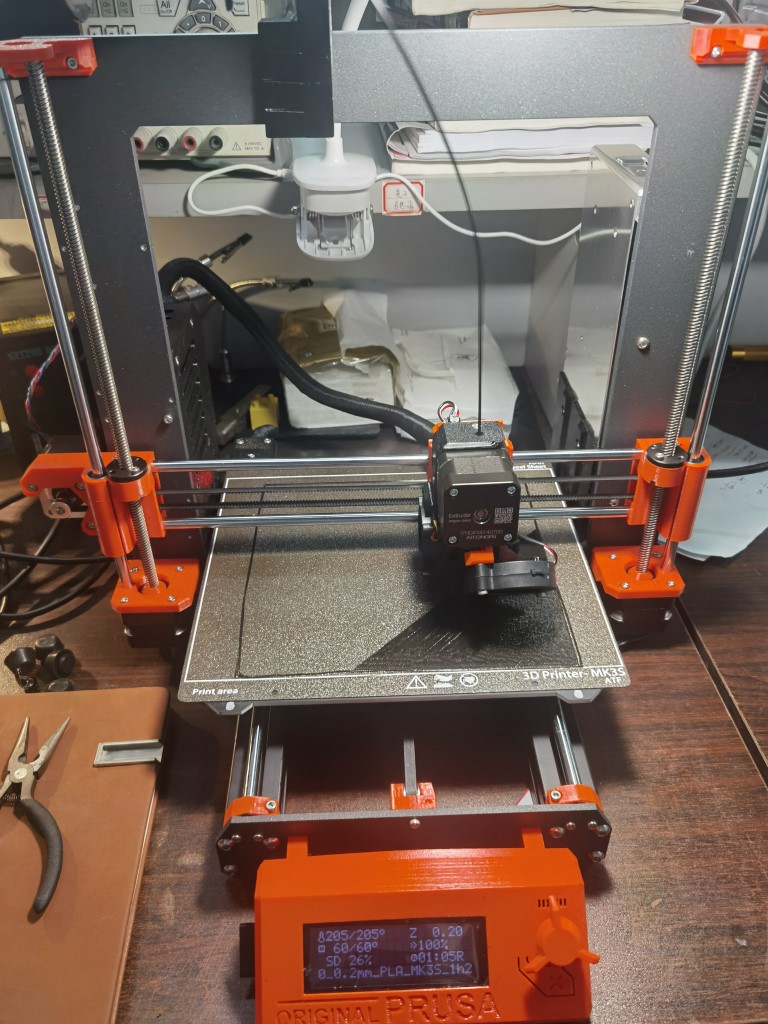
柔性机械抓测试,简单的3D打印件和一个简单的直流电机
PID测试,对于目标的检测和跟踪功能。

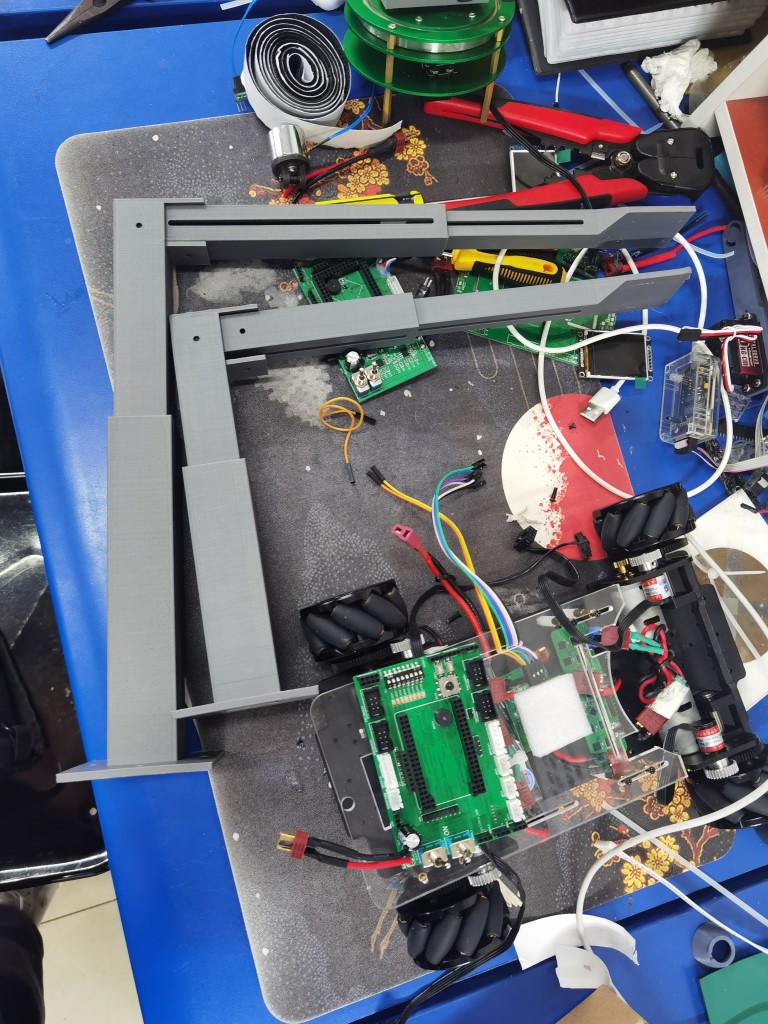
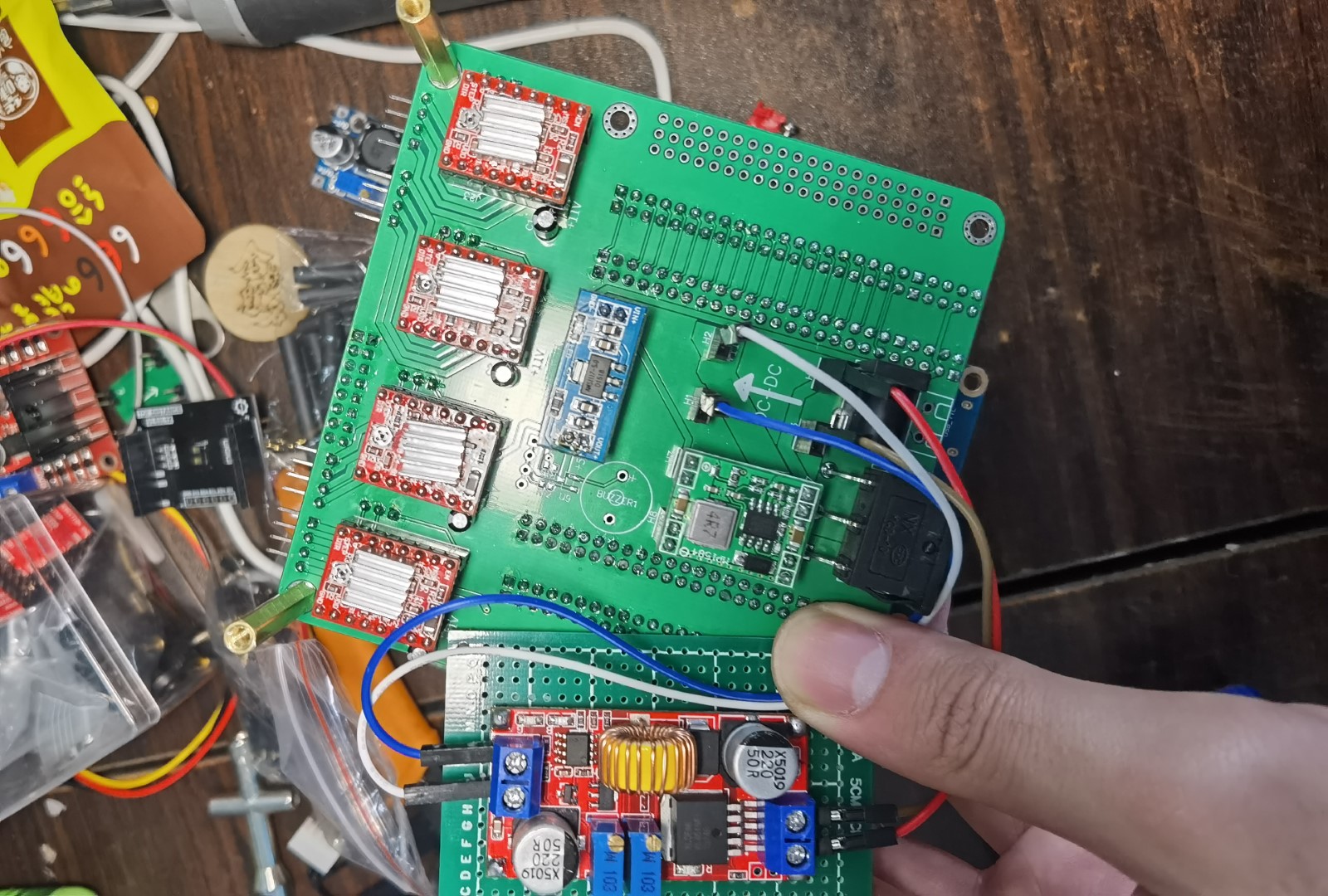
前方的舵机云台和后方的STM32扩展板
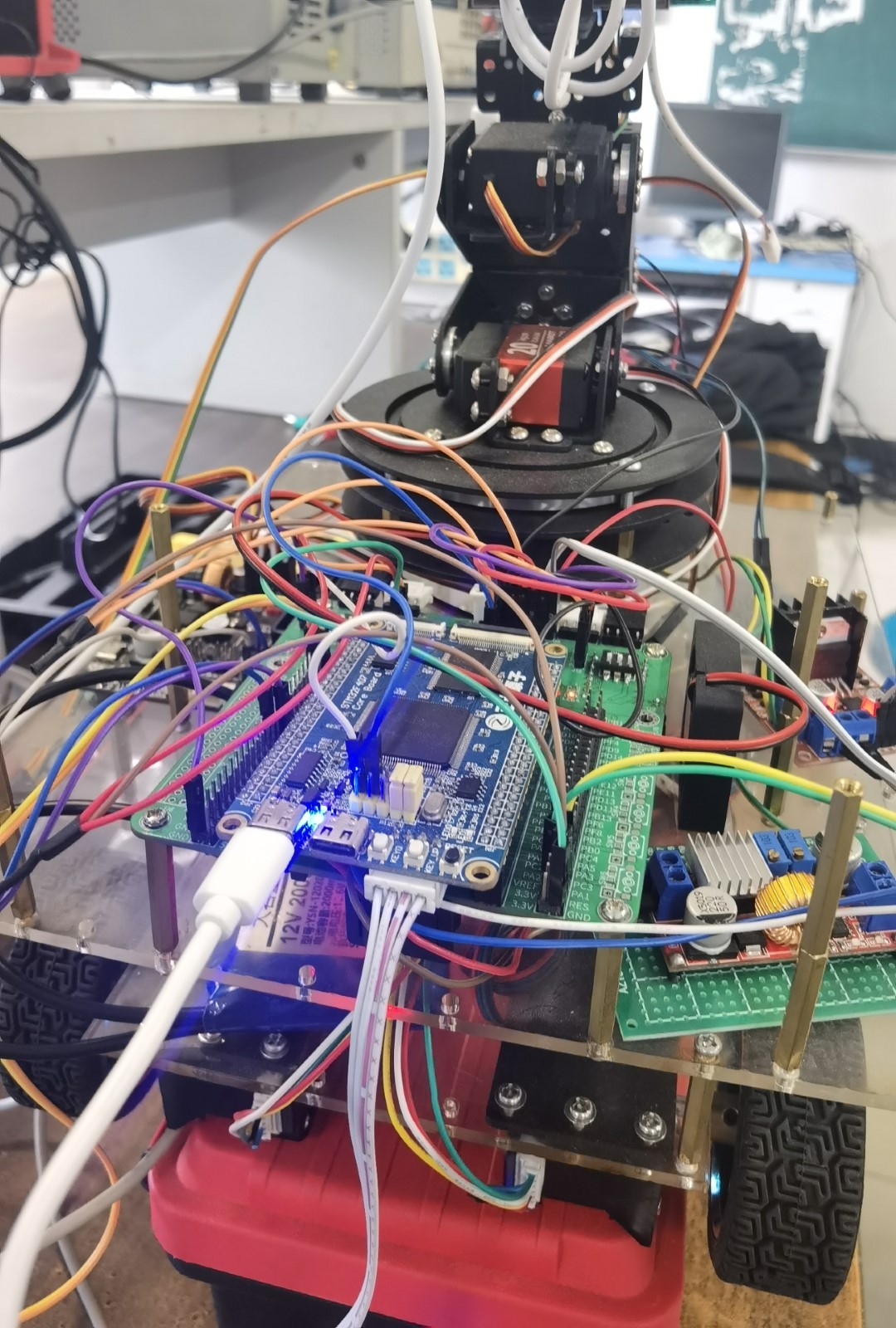
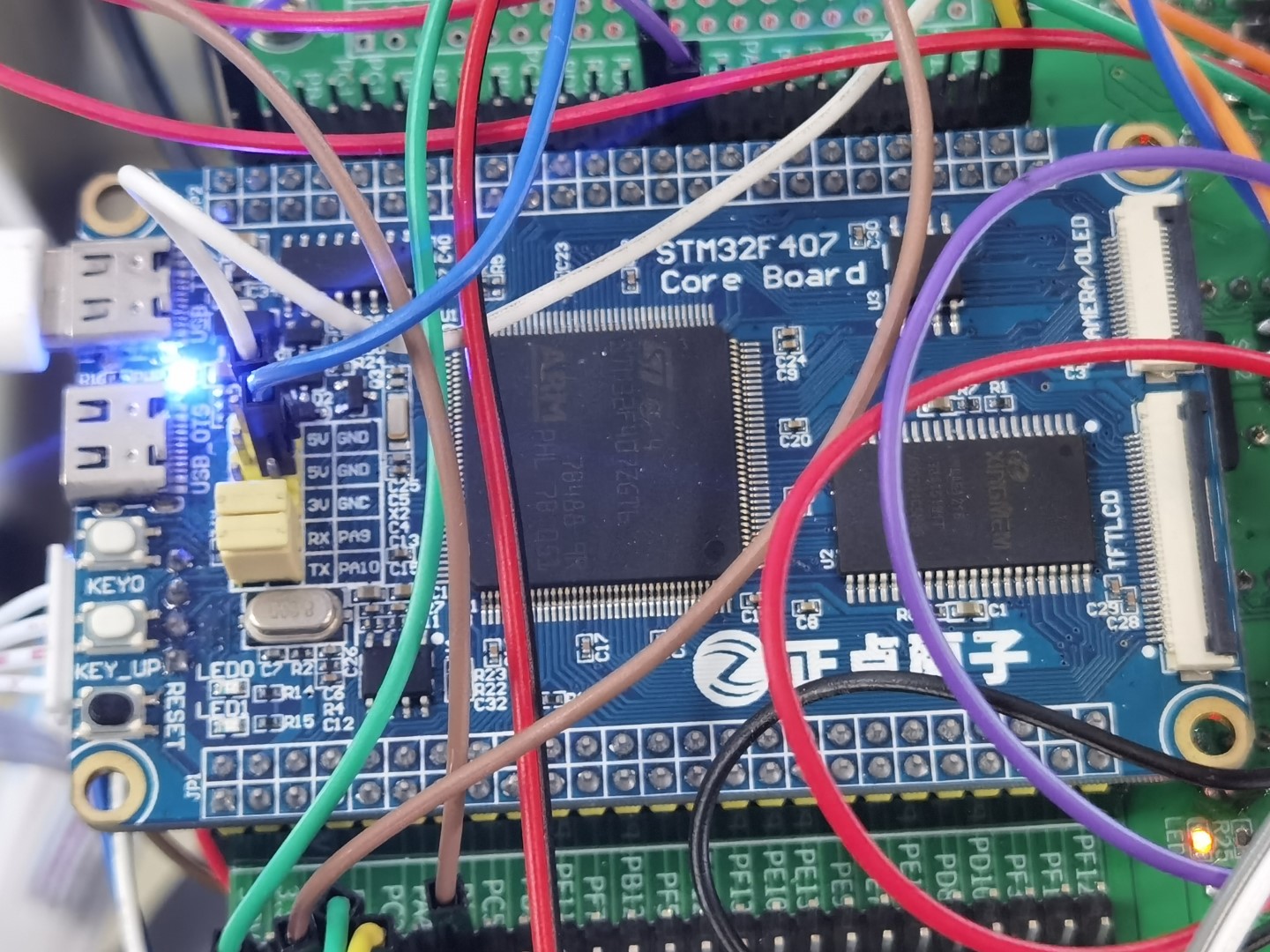
STM32F407主控板
巡线功能测试
solidworks装配体
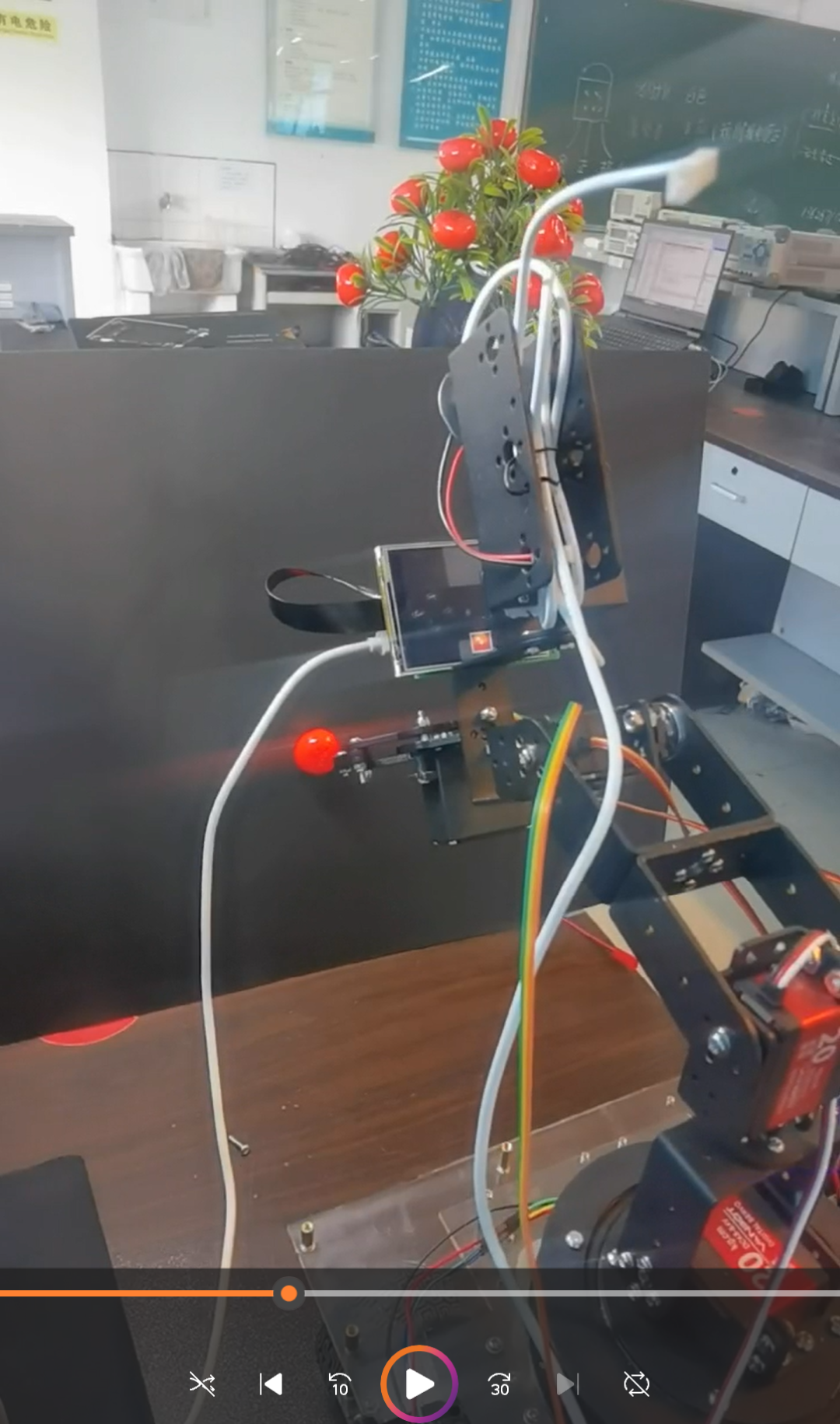
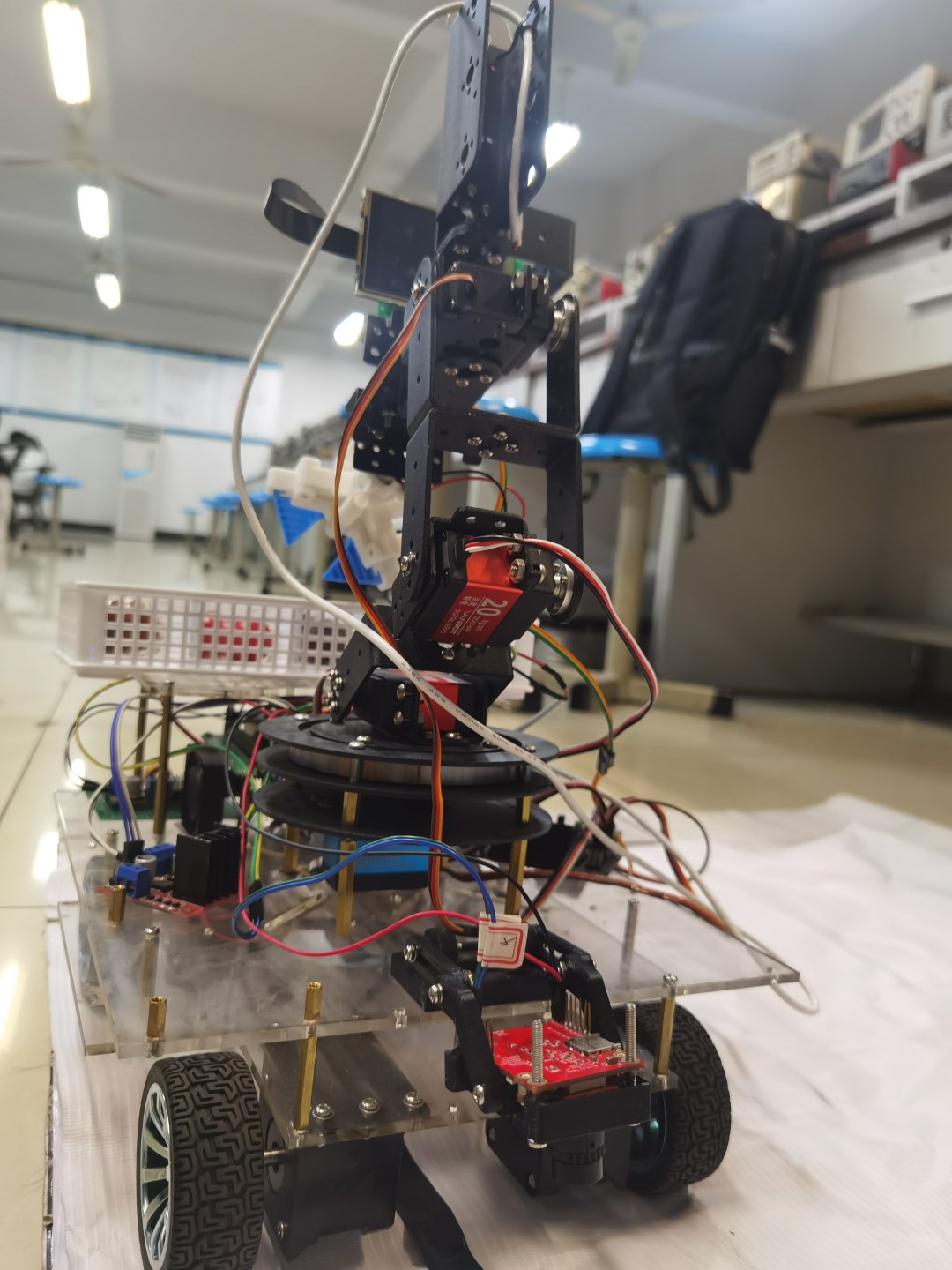
机械臂总体结构和柔性机械抓,小车前部的openMV巡线模块
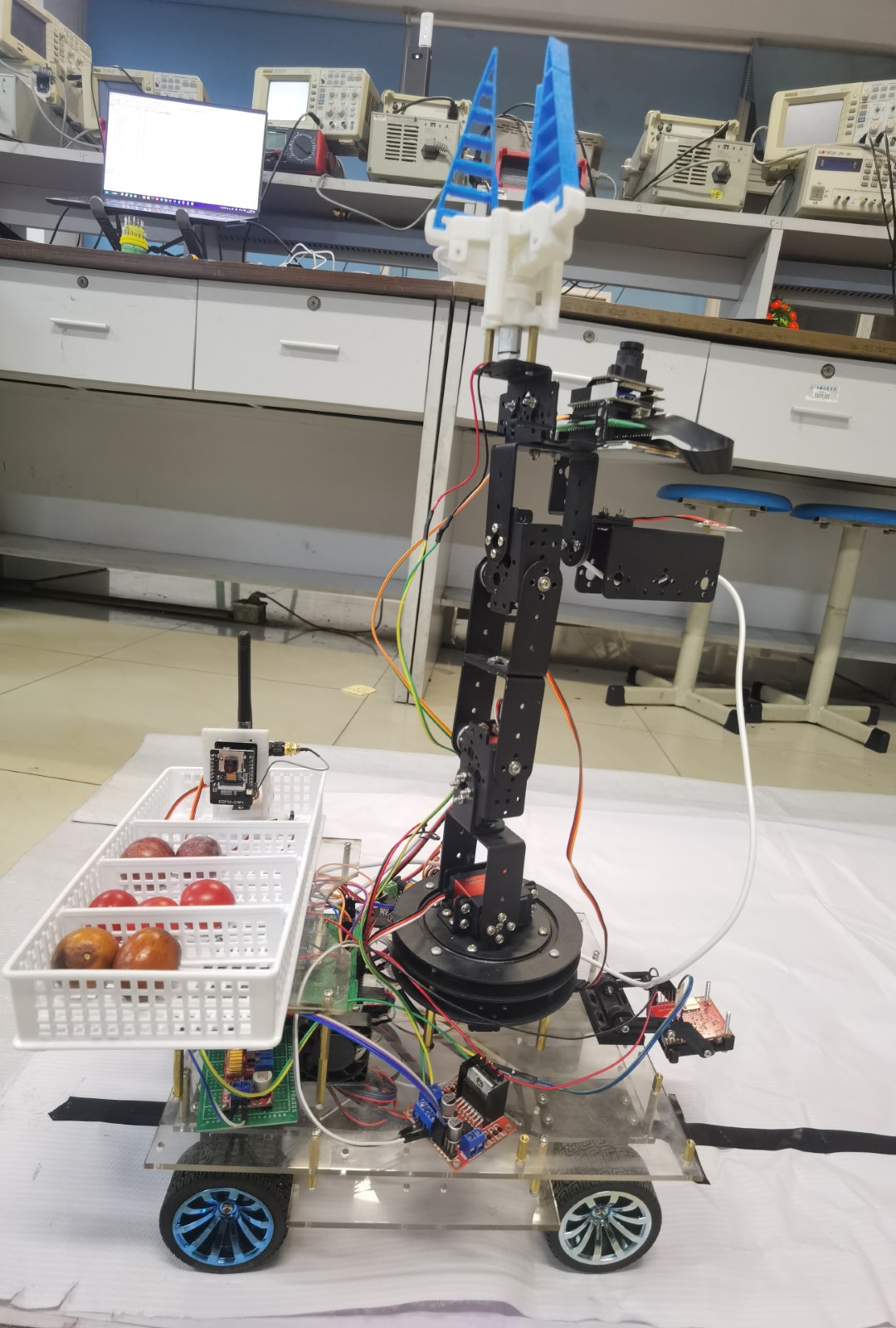
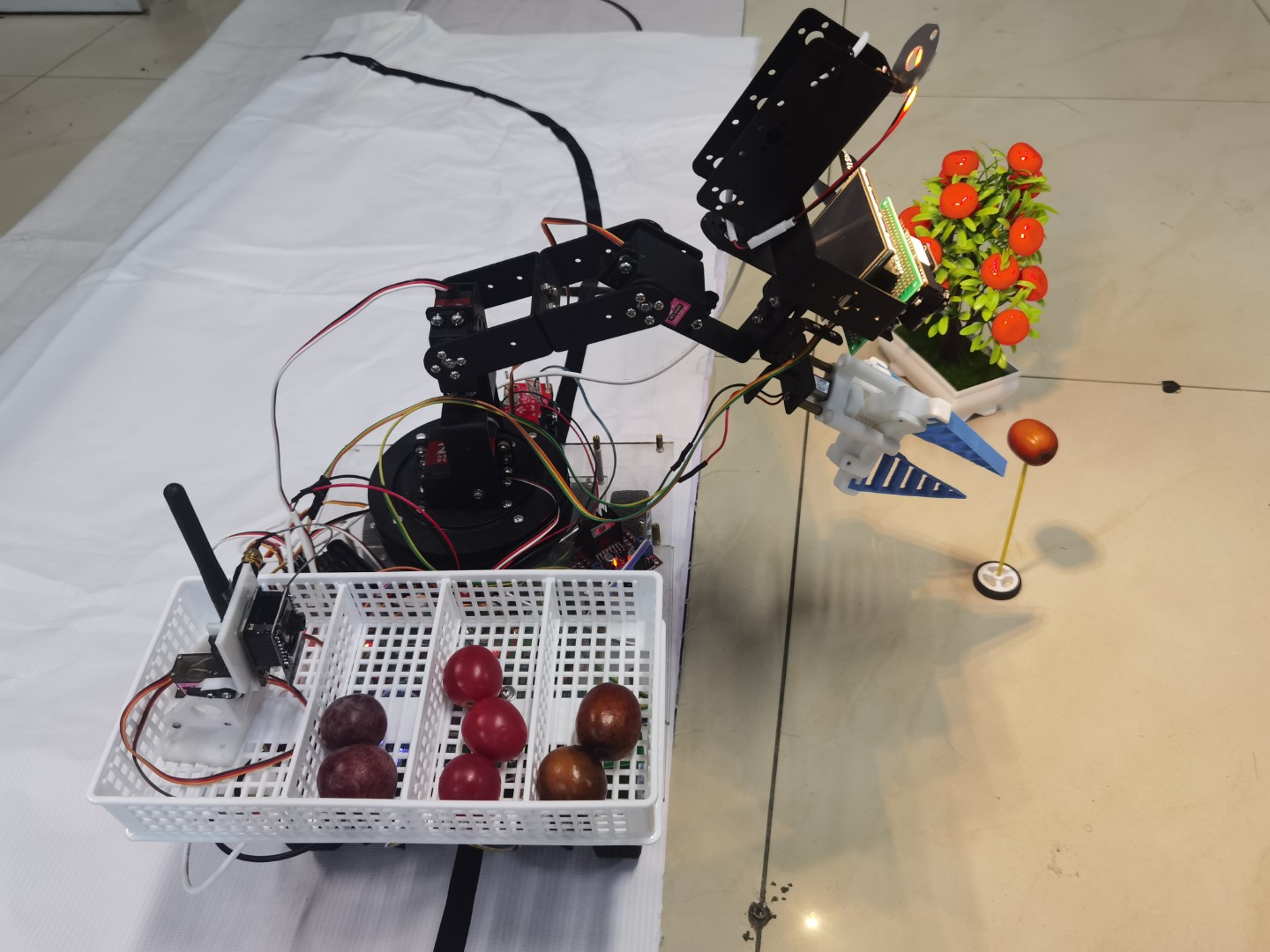
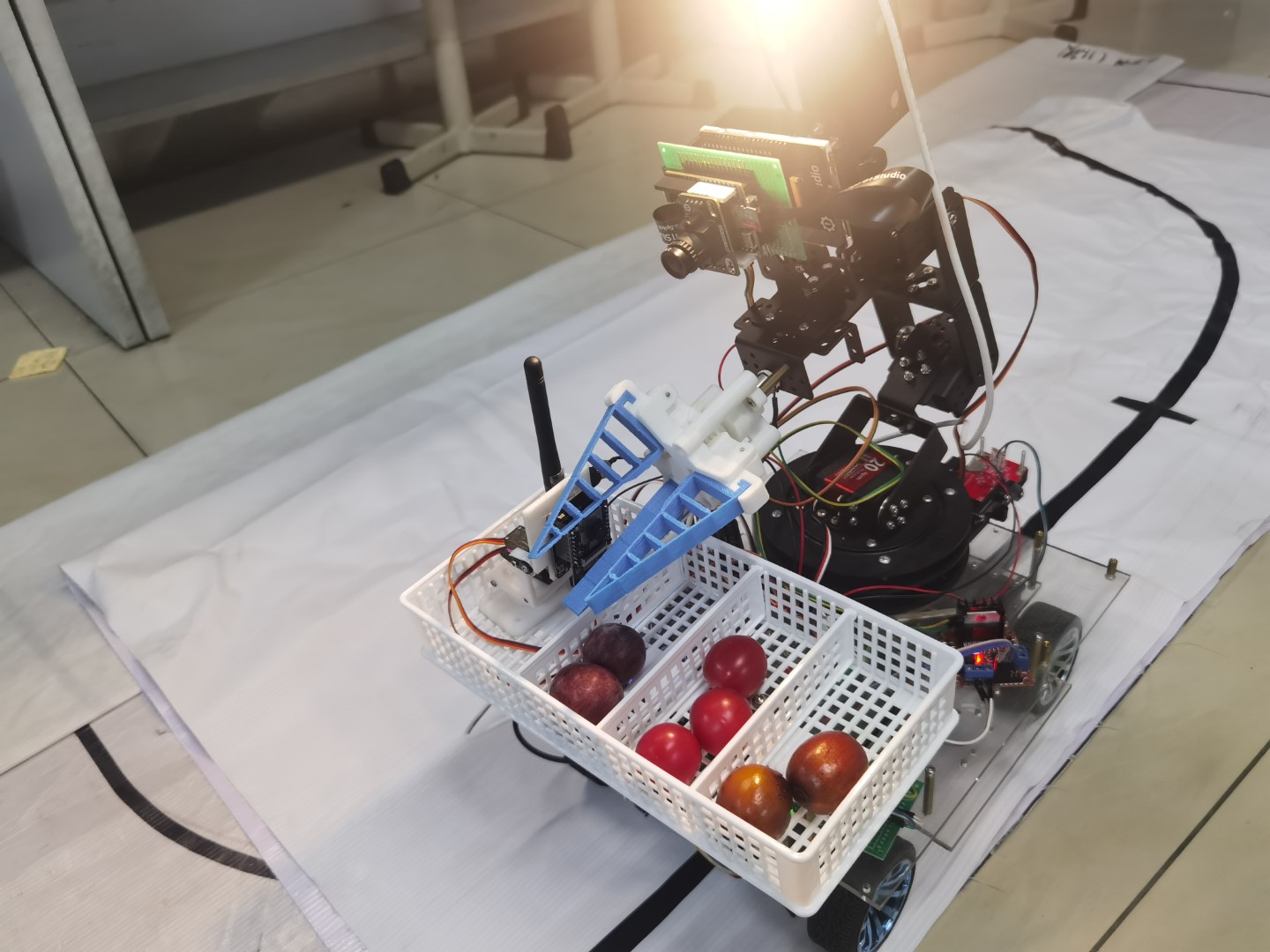
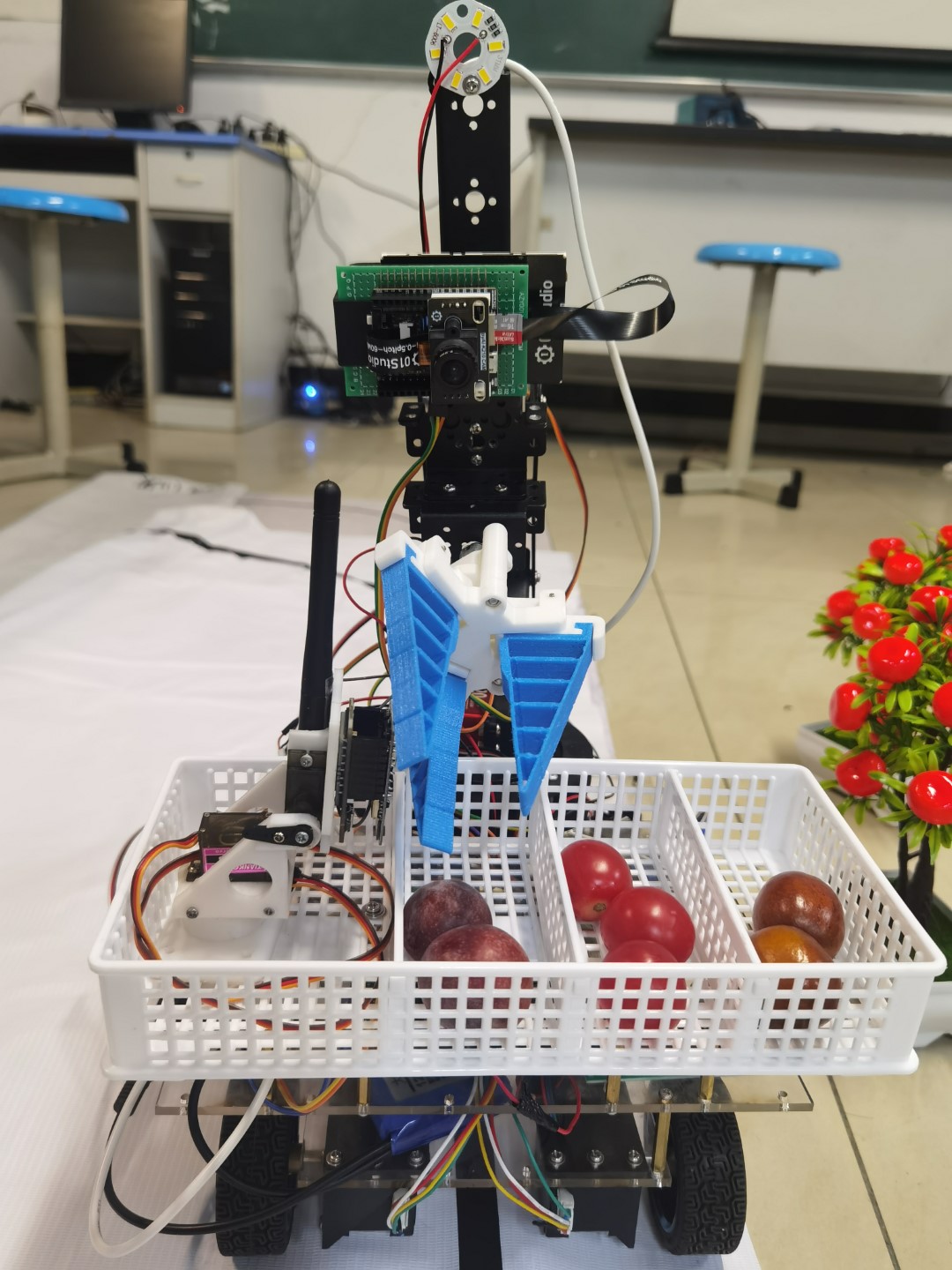
机械臂上方的为K210摄像头模块,有水果篮和左边的esp32-cam监控设备