大二阶段项目——第十八届智能汽车竞赛智能视觉组
参加了第十八届智能汽车竞赛智能视觉组,该组别的总体比赛流程就是先识别一个有很多节点的图片,使用特定的算法解决TSP(旅行商问题),可以使用贪心算法,模拟退火算法,遗传算法等等,将需要运动的最短轨迹通过这个计算出,之后就操控麦克纳姆轮小车去相关的点位,通过openart(类似于openMV)进行图像识别,通过之前训练的模型,进行定位和分类图中物体类别的工作,然后使用机械臂抓取铁性材质的图片,再将同一类型的图片放到相对应的位置。第十八届智能汽车竞赛智能视觉组数据集分为蔬菜、粮食和水果三大类,15个小类,一般可以通过eiq软件进行深度学习全流程的简化设计,但是我觉得不太有意思,所以我是使用了python直接在本地运行各种图像处理算法(可设定参数的旋转,裁剪、色调变换,饱和度变化等等)。因为是在openart(类似于openMV)的MCU上跑模型,应为在MCU中存储和运算资源都很有限,所以比赛中我们对于模型的大小很敏感,其速度准确度直接影响到比赛结果,所以模型量化和训练数据集的质量好数量就显得十分重要,我们当然也花了很多的时间进行原始数据的采集和训练。
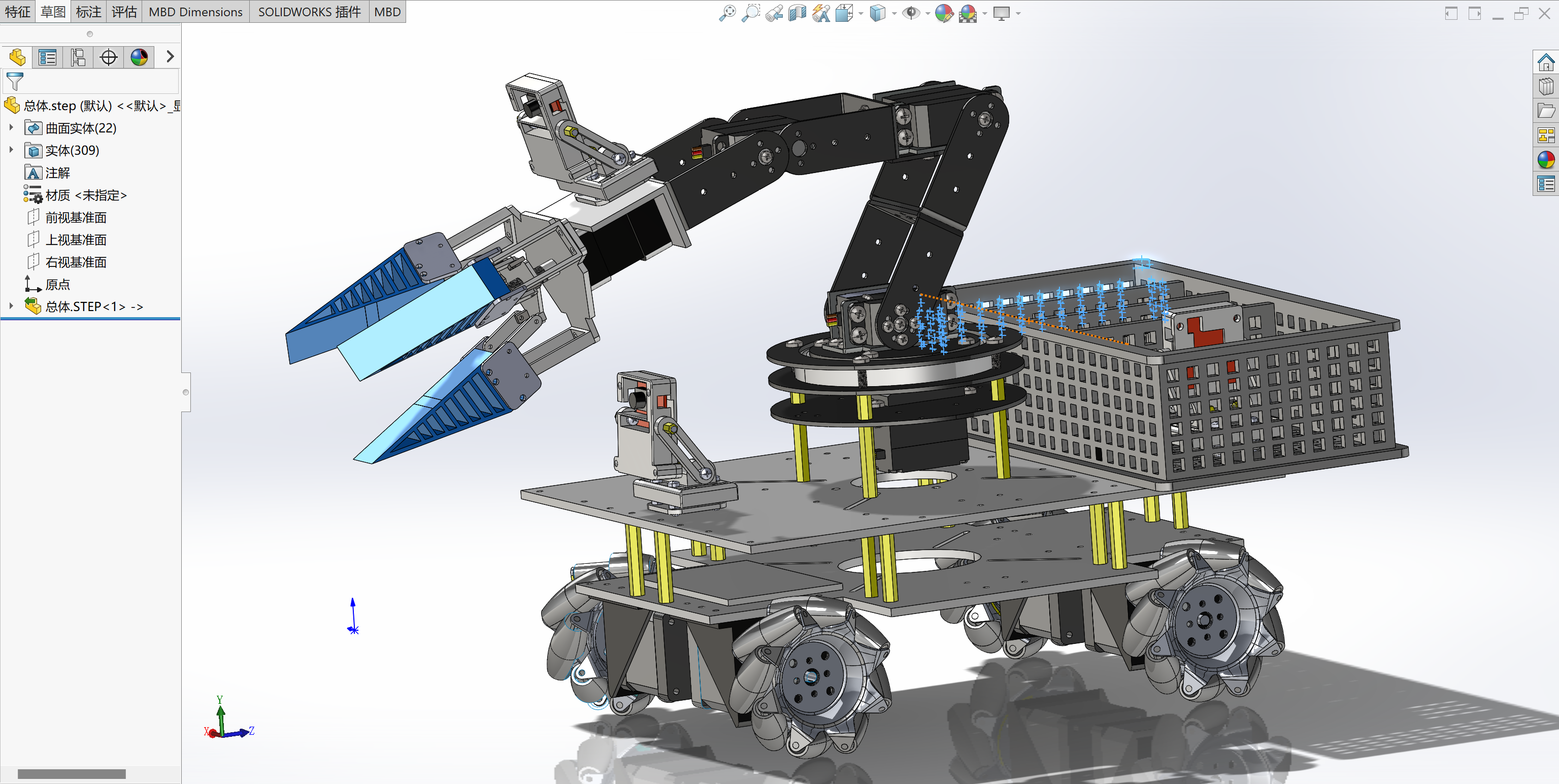
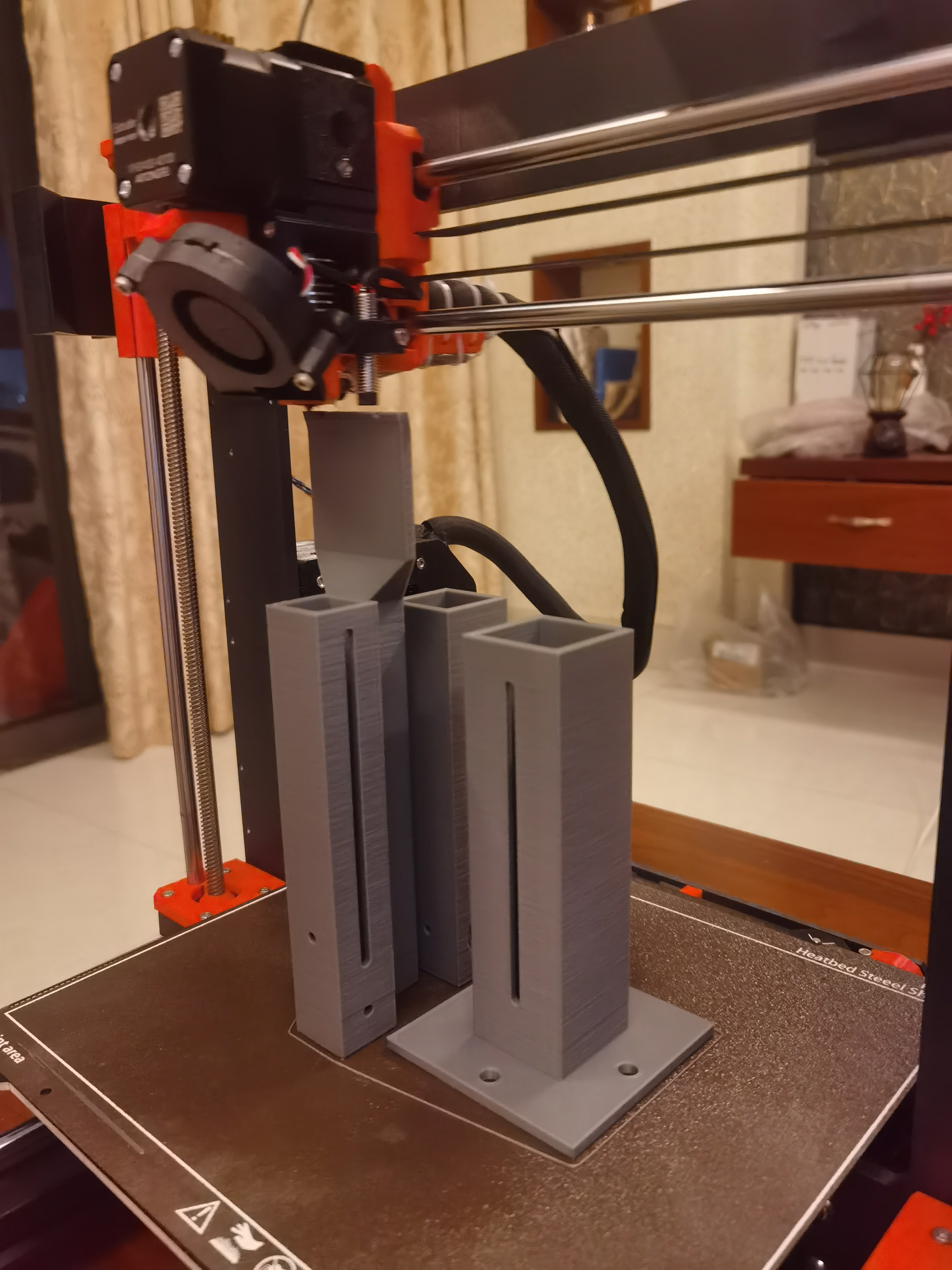
正好我之前自己装好了3D打印机,只要使用solidworks设计openart摄像头模块的支架,通过prusaslicer切片软件导出gcode文件,之后通过SD卡传输到3D打印机中,选择该文件开始打印就可以了。效果不错。
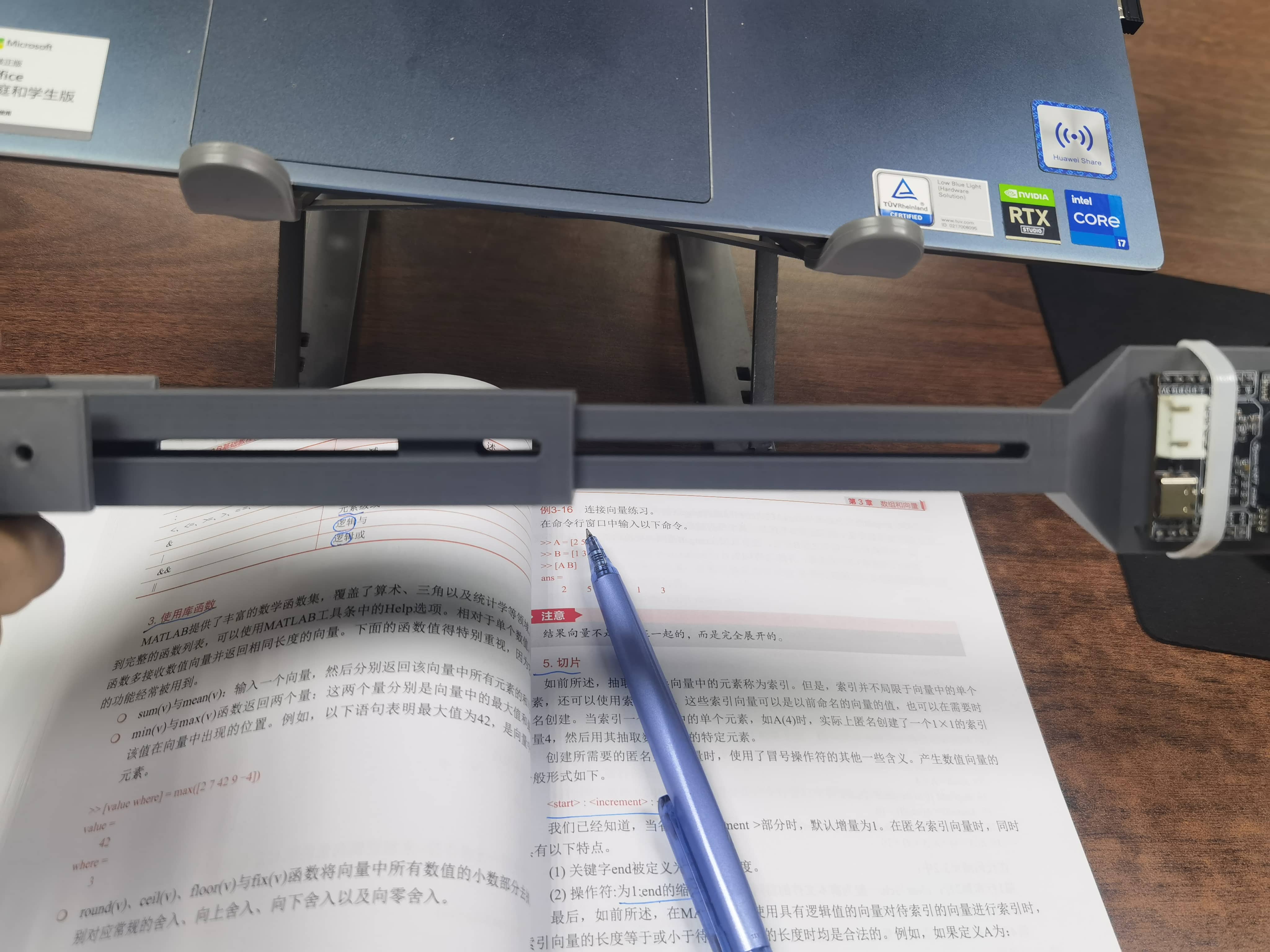


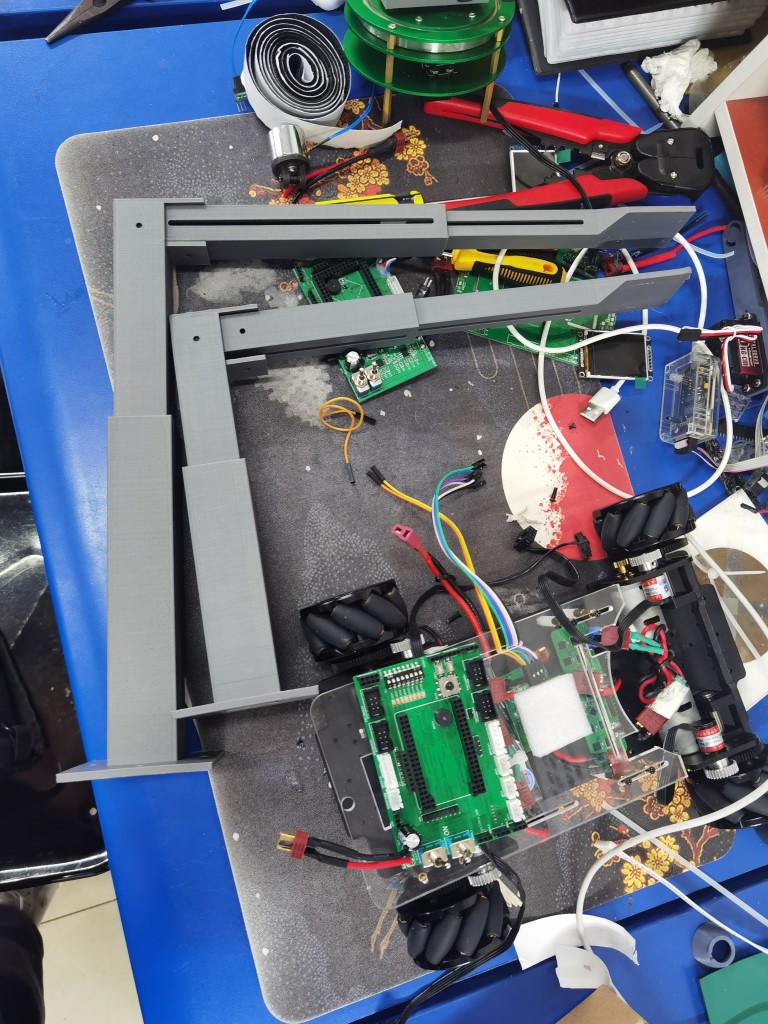
固定摄像头开始测试,不得不说这样固定住摄像再进行图片的识别操作十分方便高效。

贪心算法求解单向TSP问题的路线。


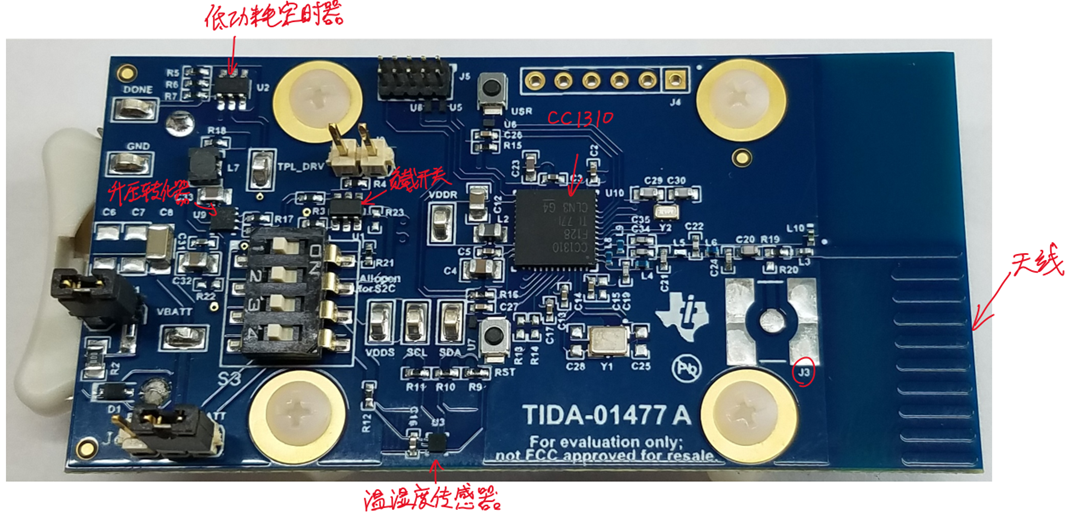
openMV部署深度学习模型,进行目标检测
学习通过eIQ软件进行深度学习全流程的设计