大二阶段项目——基于JetsonNano的ROS麦克纳姆轮小车学习
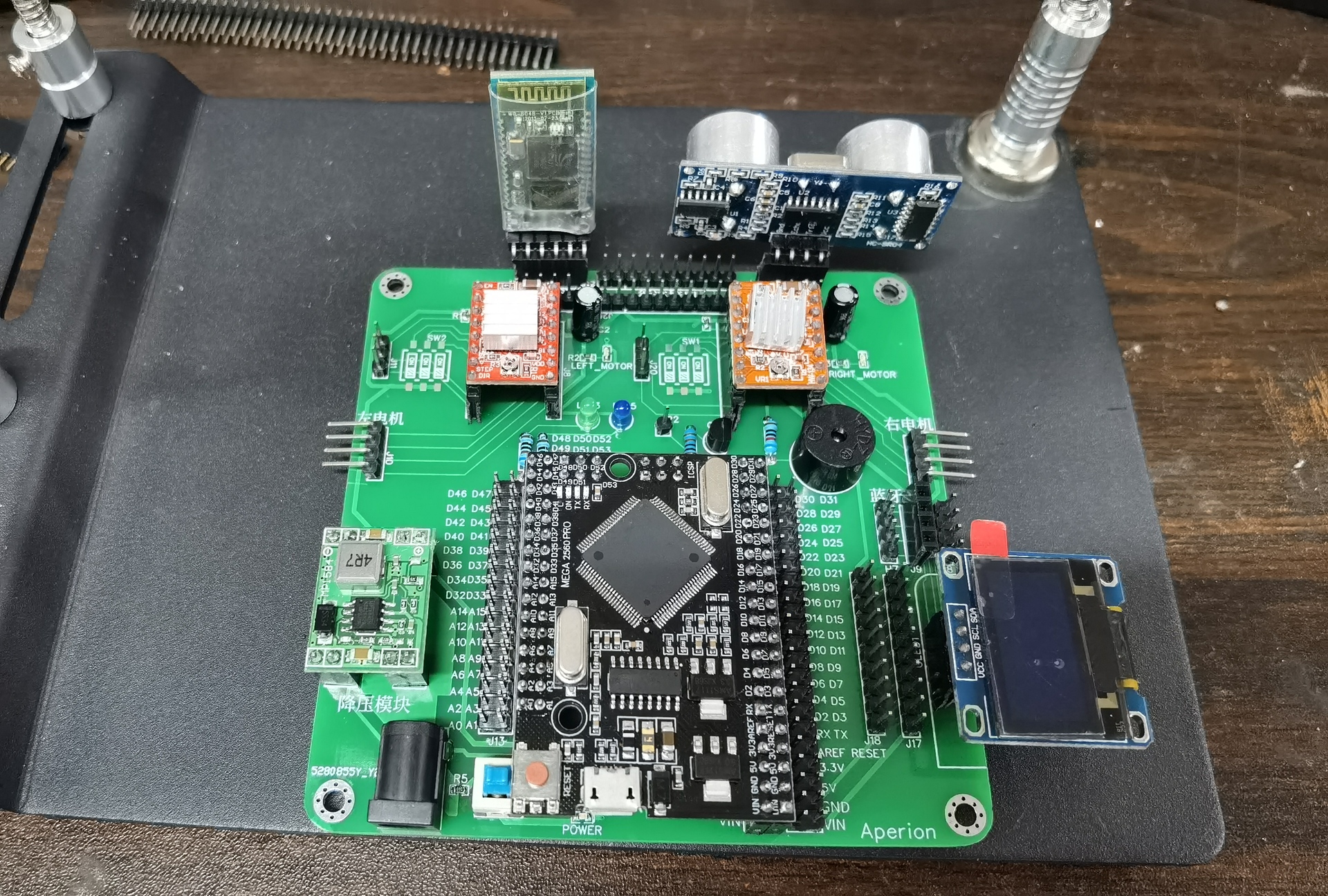
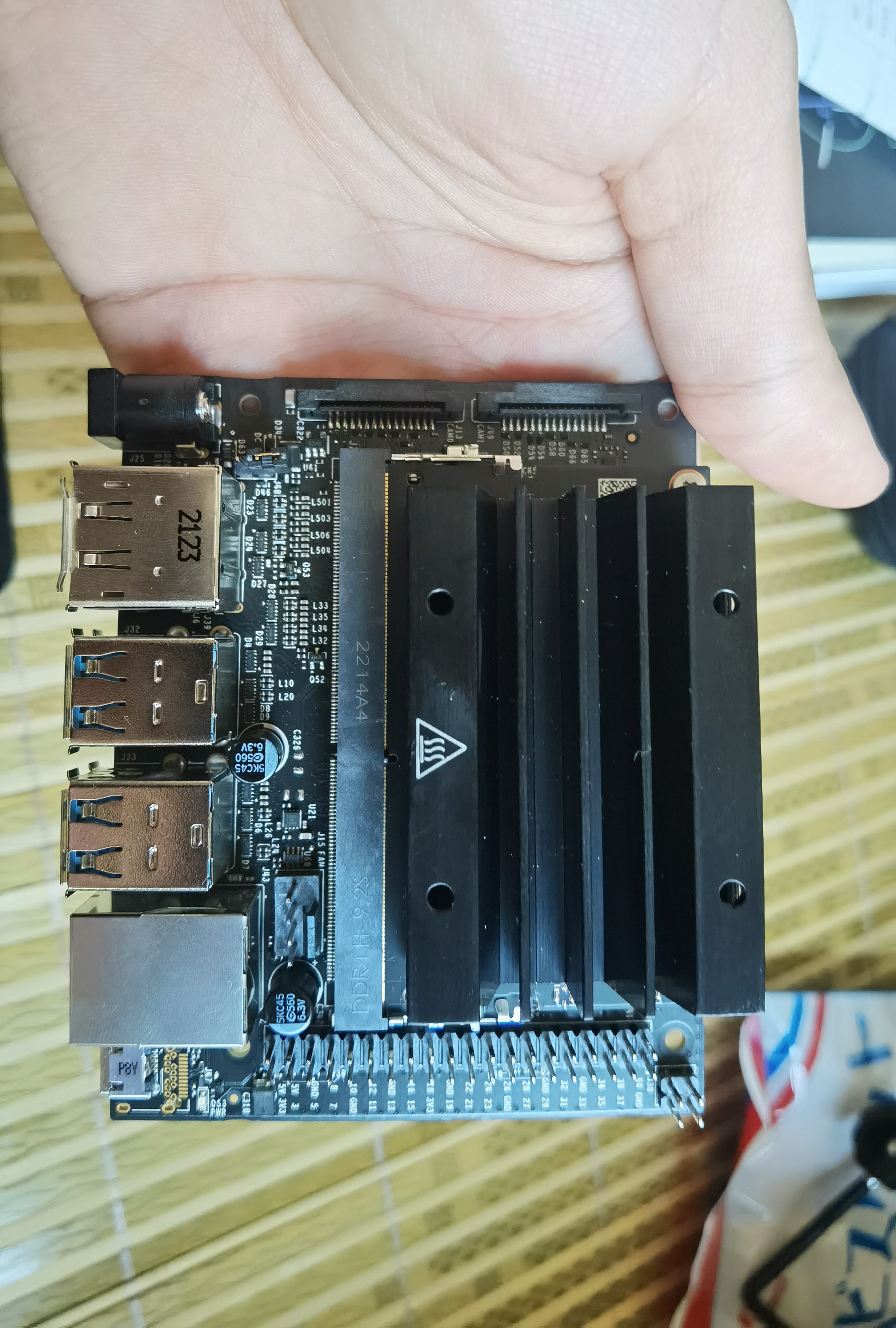
暑期学习了基于JetsonNano的ROS麦克纳姆轮小车,有深度相机和激光雷达的功能,对于复杂的高级功能有了初步的了解,比如使用STM32F407作为下位机,主要控制小车的各种基本功能(四个直流电机,蓝牙,OLED显示等等功能),之后通过串口通信在JetsonNano中运行的ROS来控制复杂的多种功能。主要有激光雷达建图功能和深度相机功能,对于PID控制的电机转速有了深刻的理解,这样可以更好的起步和停止,还有通过激光雷达自动避障功能。




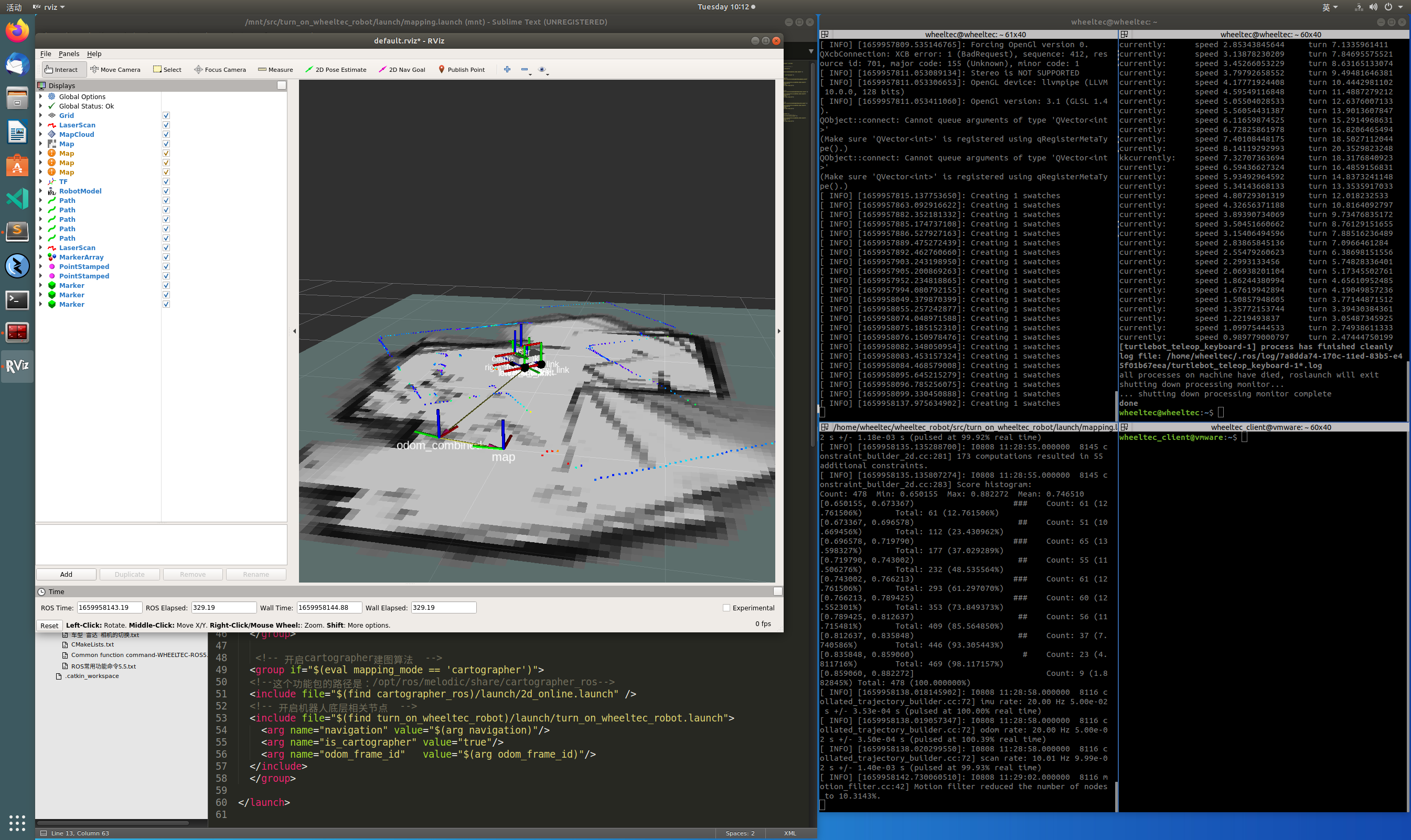
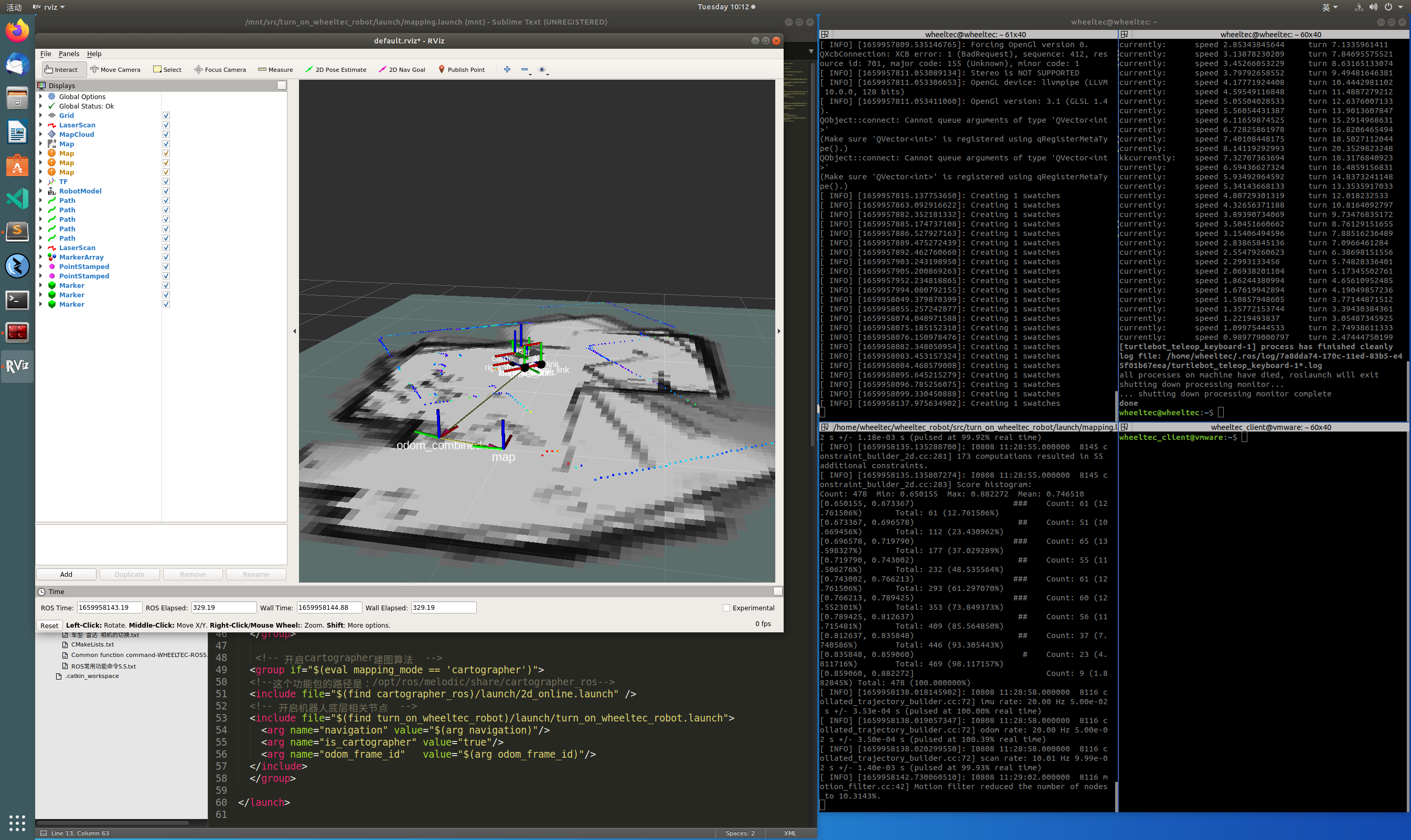
使用激光雷达建图,但是因为起点和终点重合了,所以地图就漂移了,没有正确建好地图