暑期电赛集训
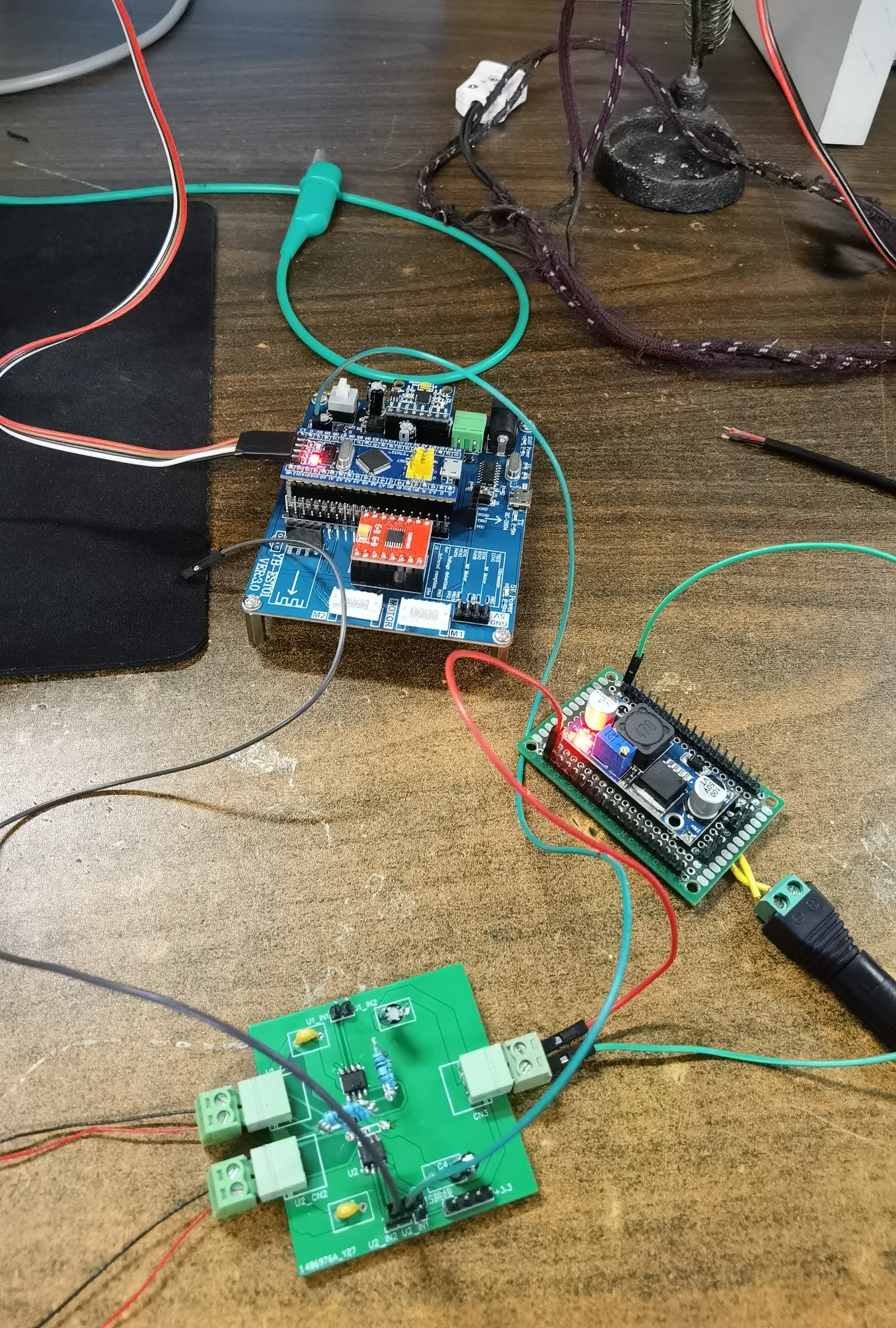
风力摆和爬坡小车的硬件部分,包括悬挂框架的组装、空心杯电机、电机驱动和陀螺仪的组装。




风力摆控制系统
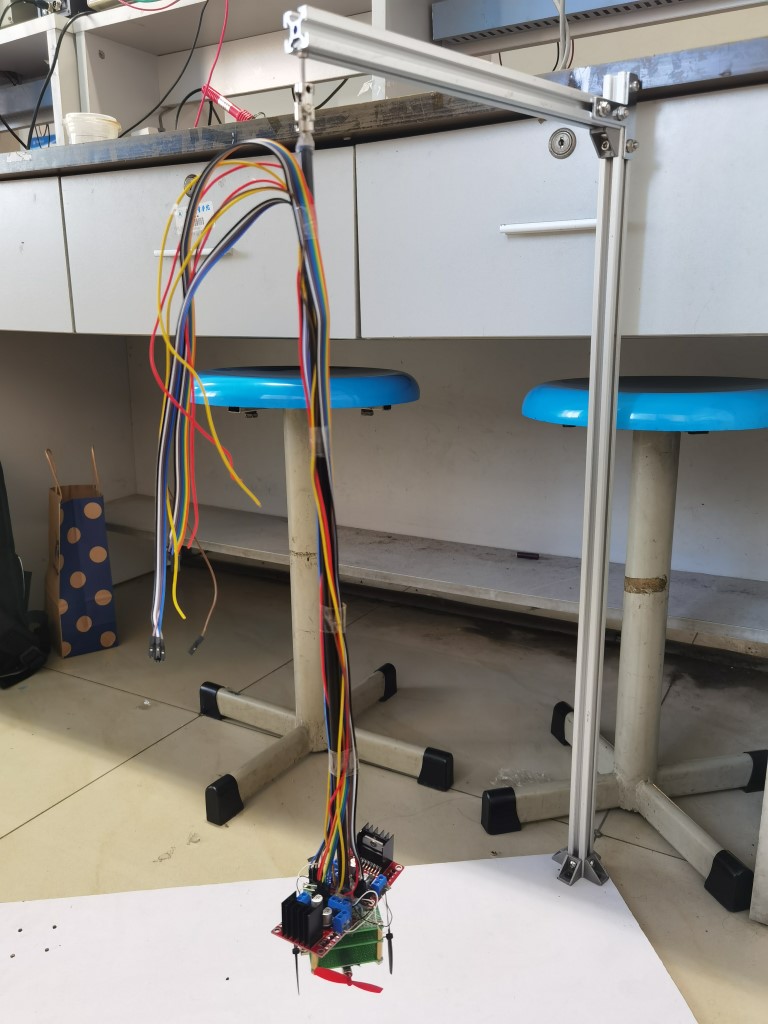
一长约 60cm~70cm 的细管上端用万向节 固定在支架上,下方悬挂一组(2~4 只)直流 风机,构成一风力摆,如图 1 所示。风力摆上 安装一向下的激光笔,静止时,激光笔的下端 距地面不超过 20cm。设计一测控系统,控制 驱动各风机使风力摆按照一定规律运动,激光 笔在地面画出要求的轨迹。
基本要求
(1) 从静止开始,15s 内控制风力摆做 类似自由摆运动,使激光笔稳定地 在地面画出一条长度不短于 50cm 的直线段,其线性度偏差不大于±2.5cm,并且具有较好的重复性;
(2) 从静止开始,15s 内完成幅度可控的摆动,画出长度在 30~60cm 间可设 置,长度偏差不大于±2.5cm 的直线段,并且具有较好的重复性;
(3) 可设定摆动方向,风力摆从静止开始,15s 内按照设置的方向(角度) 摆动,画出不短于 20cm 的直线段;
(4) 将风力摆拉起一定角度(30°~45°)放开,5s 内使风力摆制动达到静 止状态。
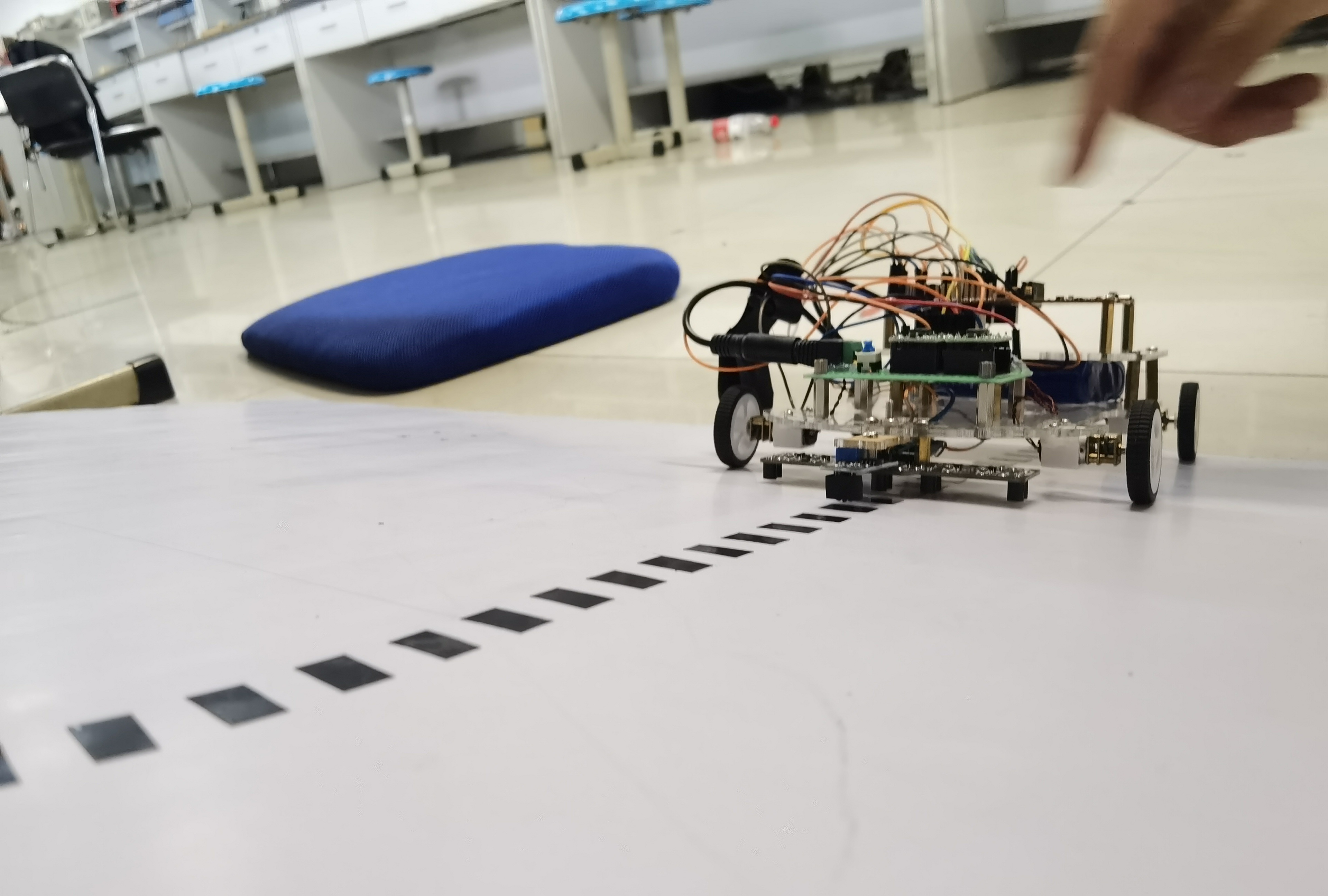
这个是基于STM32F103C8T6主控,两个L298电机驱动模块,四个空心杯电机,加上复杂的控制算法,下方正中心有红外线,可以在下方的木板中显示路径。调试的时候通过串口助手反馈信息,调整PID,使其可以进行直线和指定距离的运行,之后就是可以进行圆形的运行

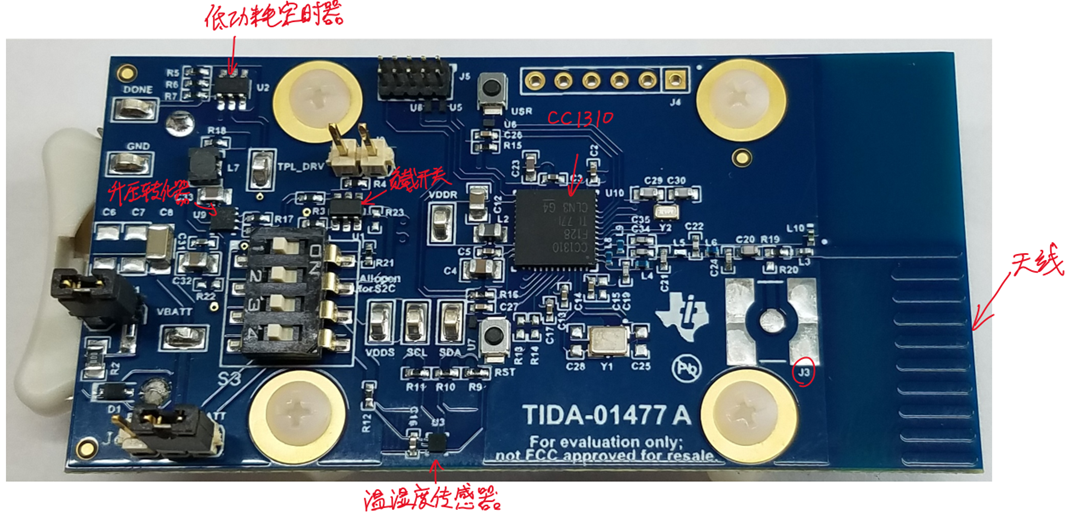
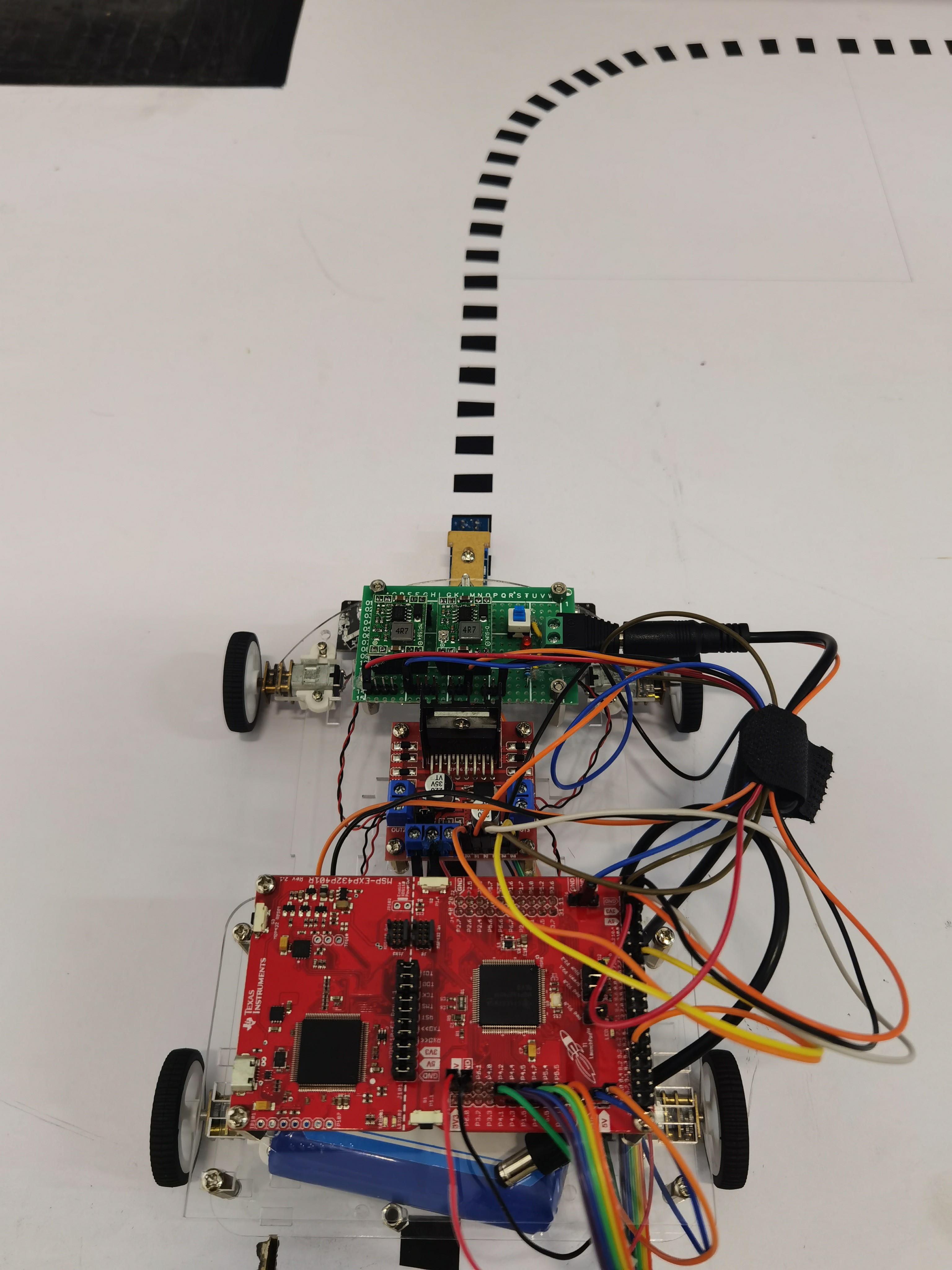
全自主设计的爬坡小车,基于TI的MSP432P401R,可以使用CCS IDE的keil v4 IDE边缘和烧录程序。

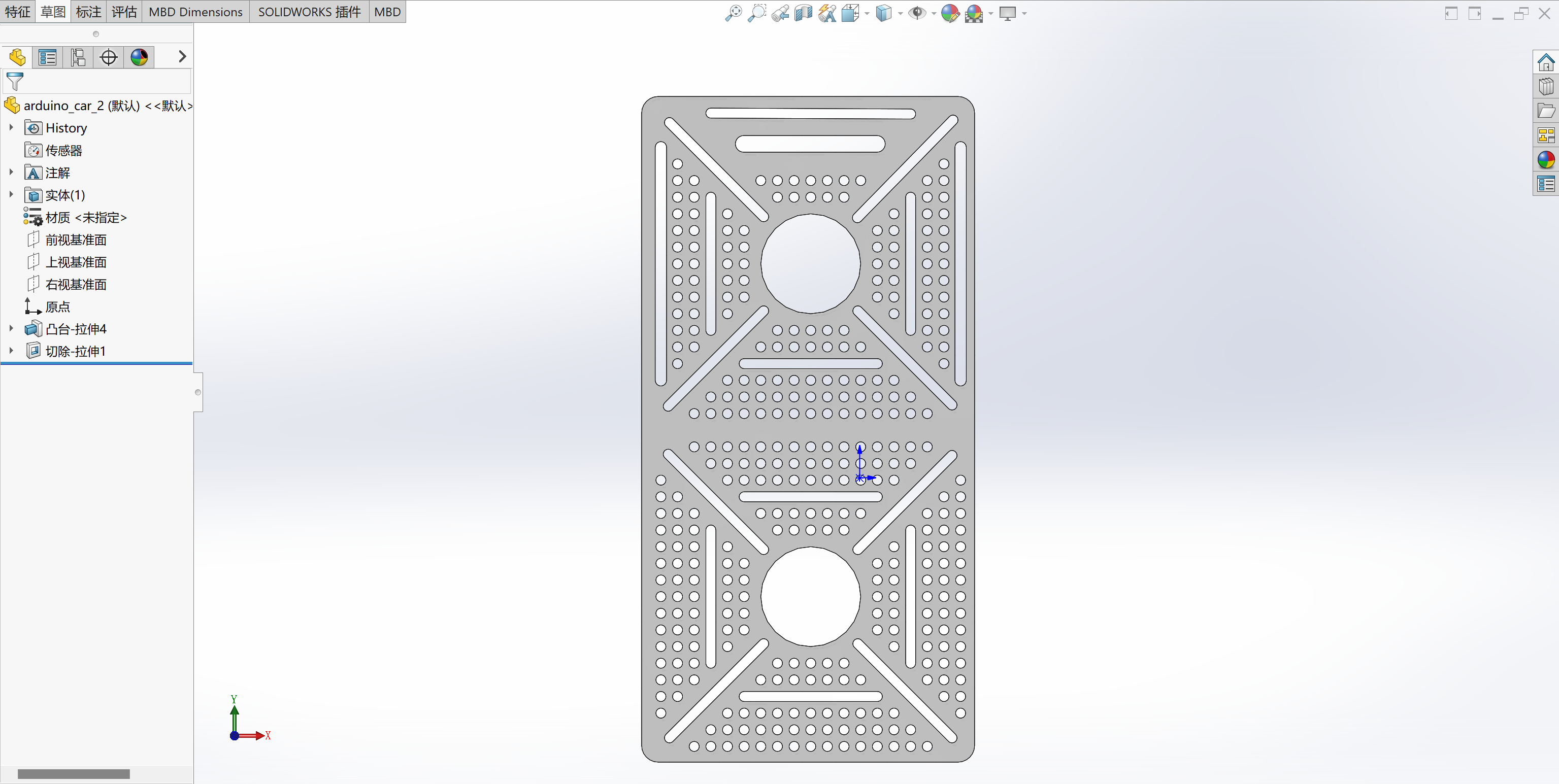
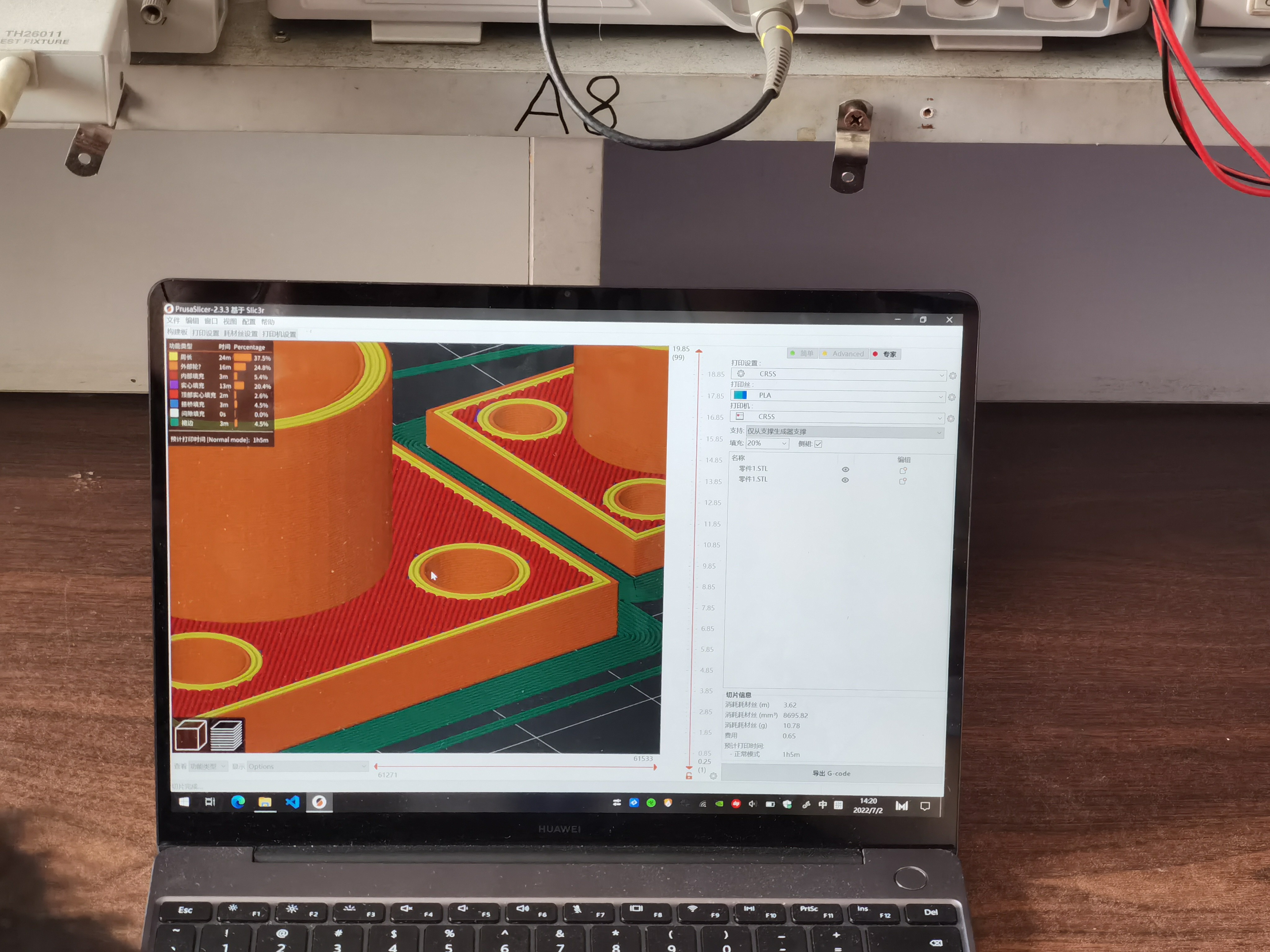
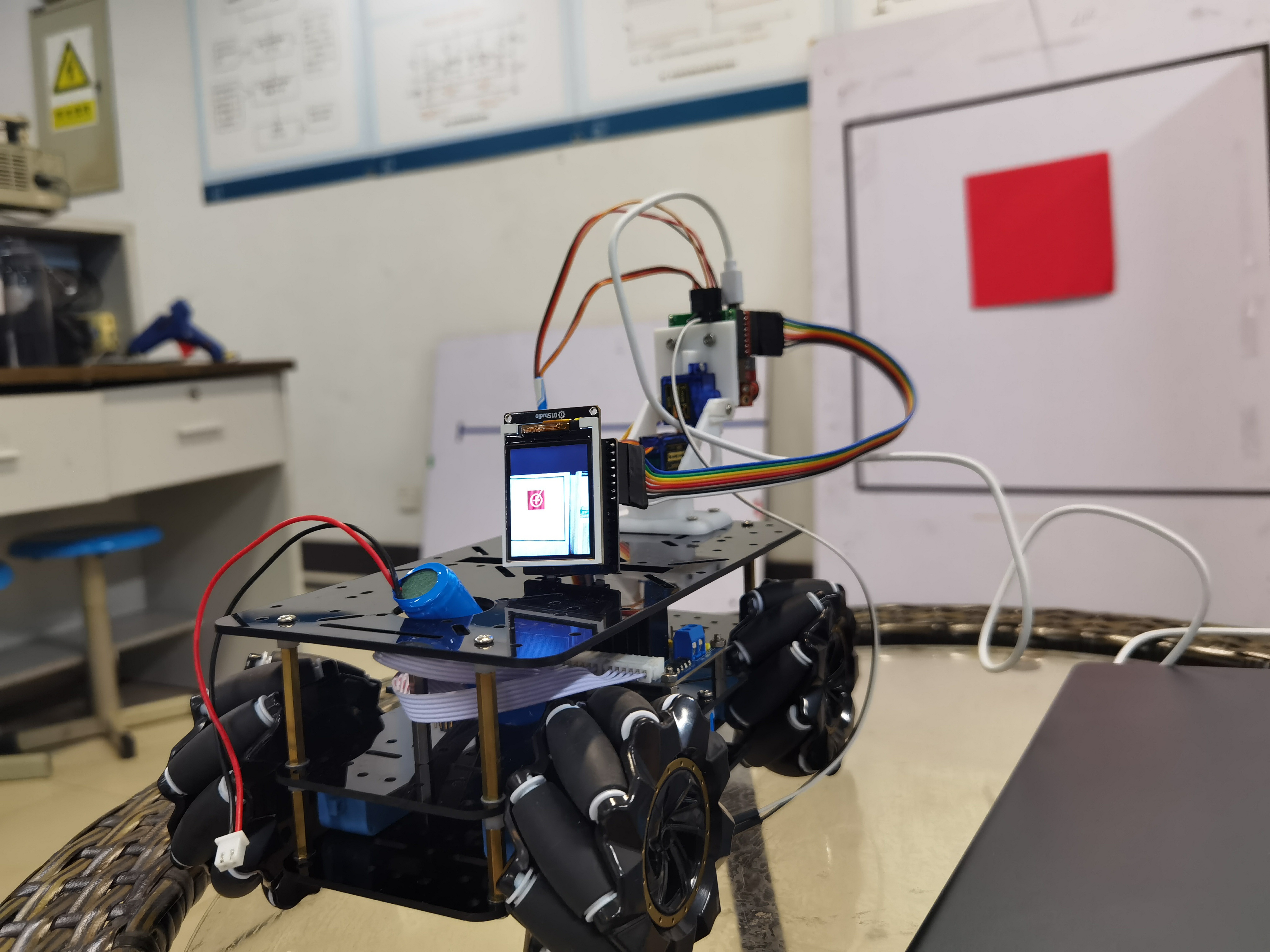
让我深刻认识到了机械结构对于PID调节的重要影响,使用了openMV开源的3D云台模型,使用了3D打印机打印材料并且自己一个一个部分组装构件,遇到了很多的问题,比如如何选择螺母进行固定,对于3D模型的基座高度不够的缺陷如何解决等等,但是由于机械结构的松动和舵机细分的影响,导致PID调节出现了很多的问题,简单说就是很舵机容易突变从而找不到目标的中心位置,这个和积分项I有很大的关系,之后换了现成的模块,解决了机械结构的问题,舵机的PID调试就变得很容易。
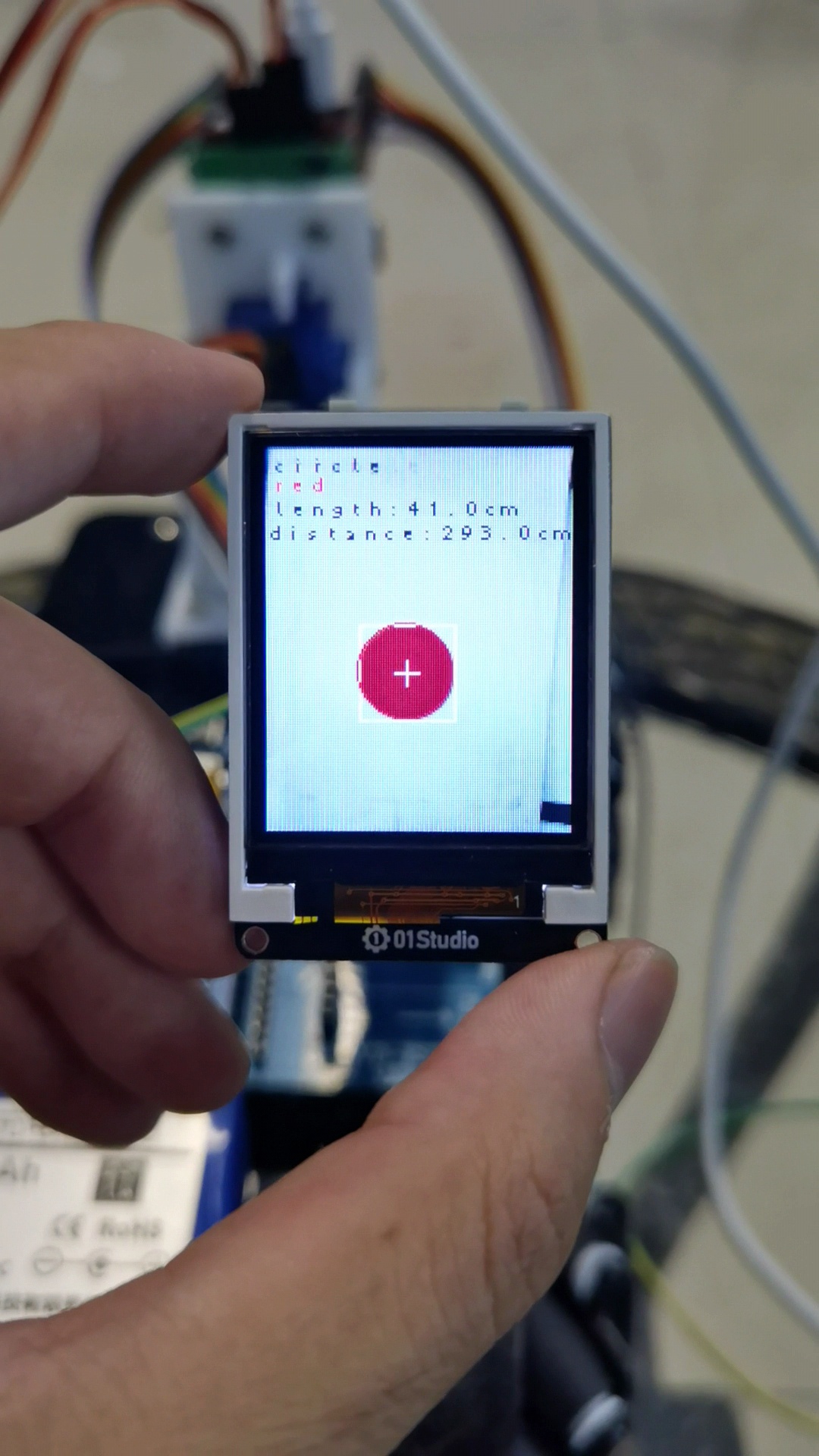
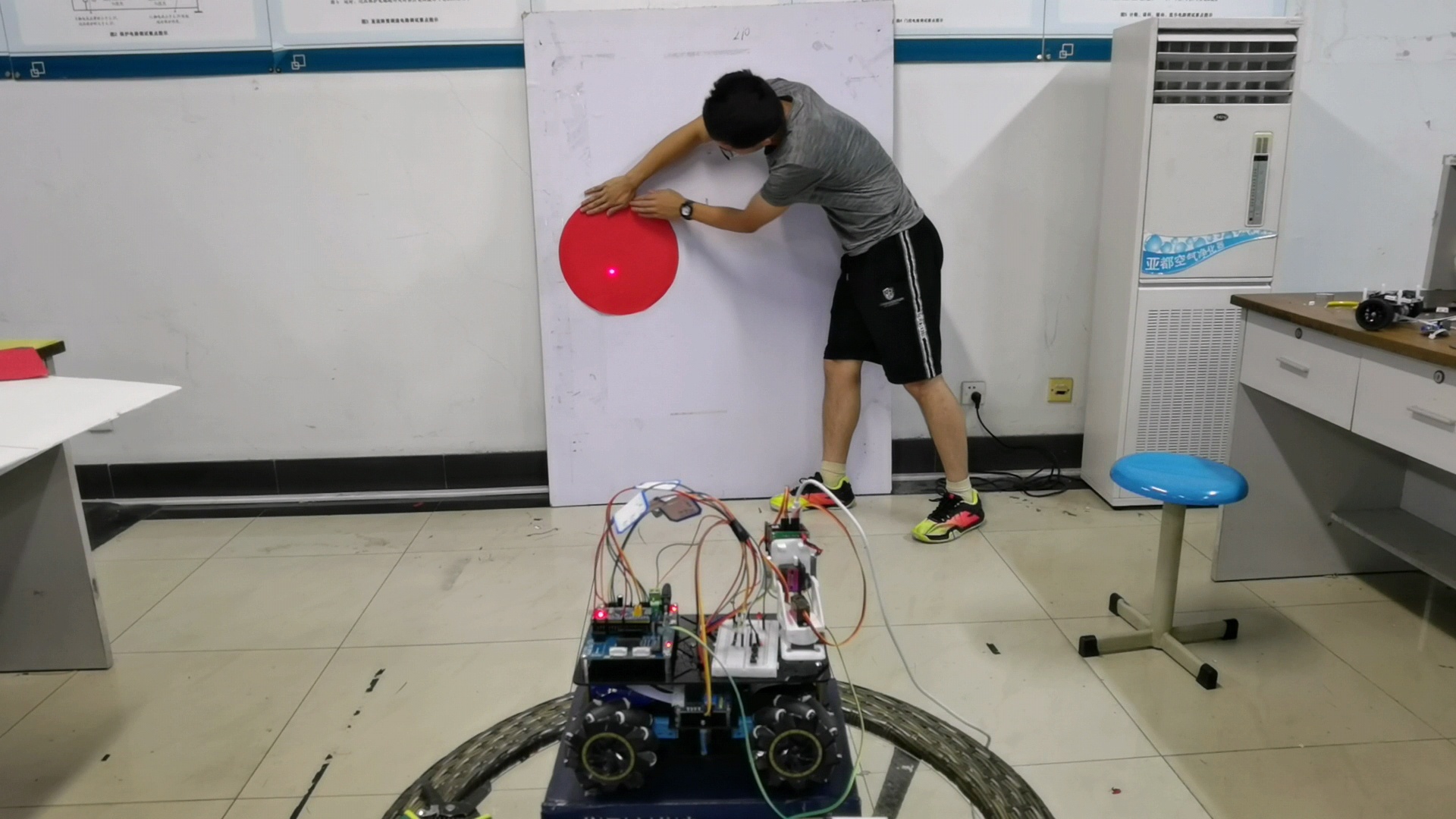
其它的任务就是通过图像处理和摄像机光学相关的计算,判断是什么图形,什么颜色,图形的几何形状,图形的距离。



电赛时,我和学长学姐在3天内,合力制作的简易小车。



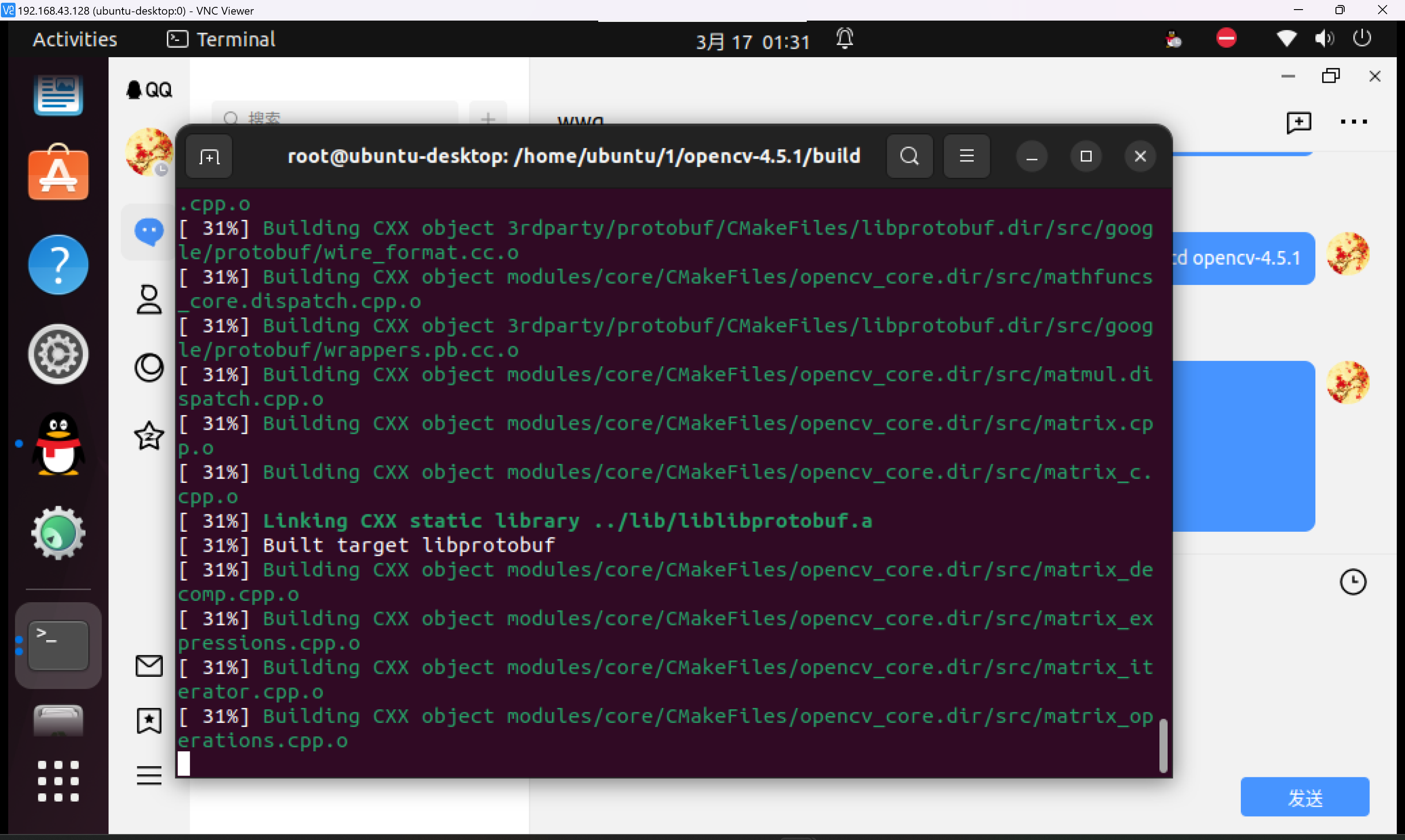
作为新手入门了树莓派,开启了之后的Ubuntu之旅。