采摘机器人扩展设计
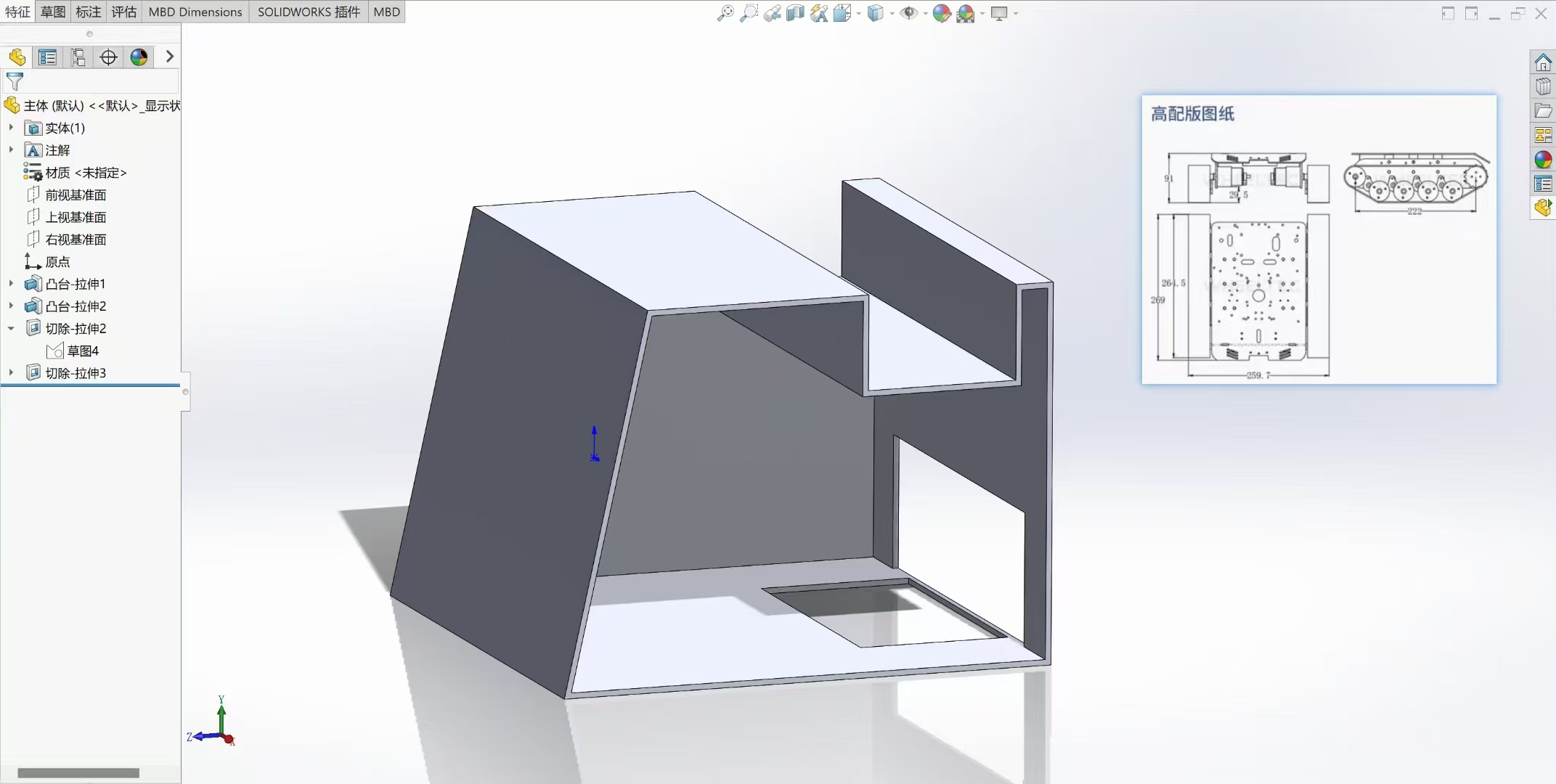
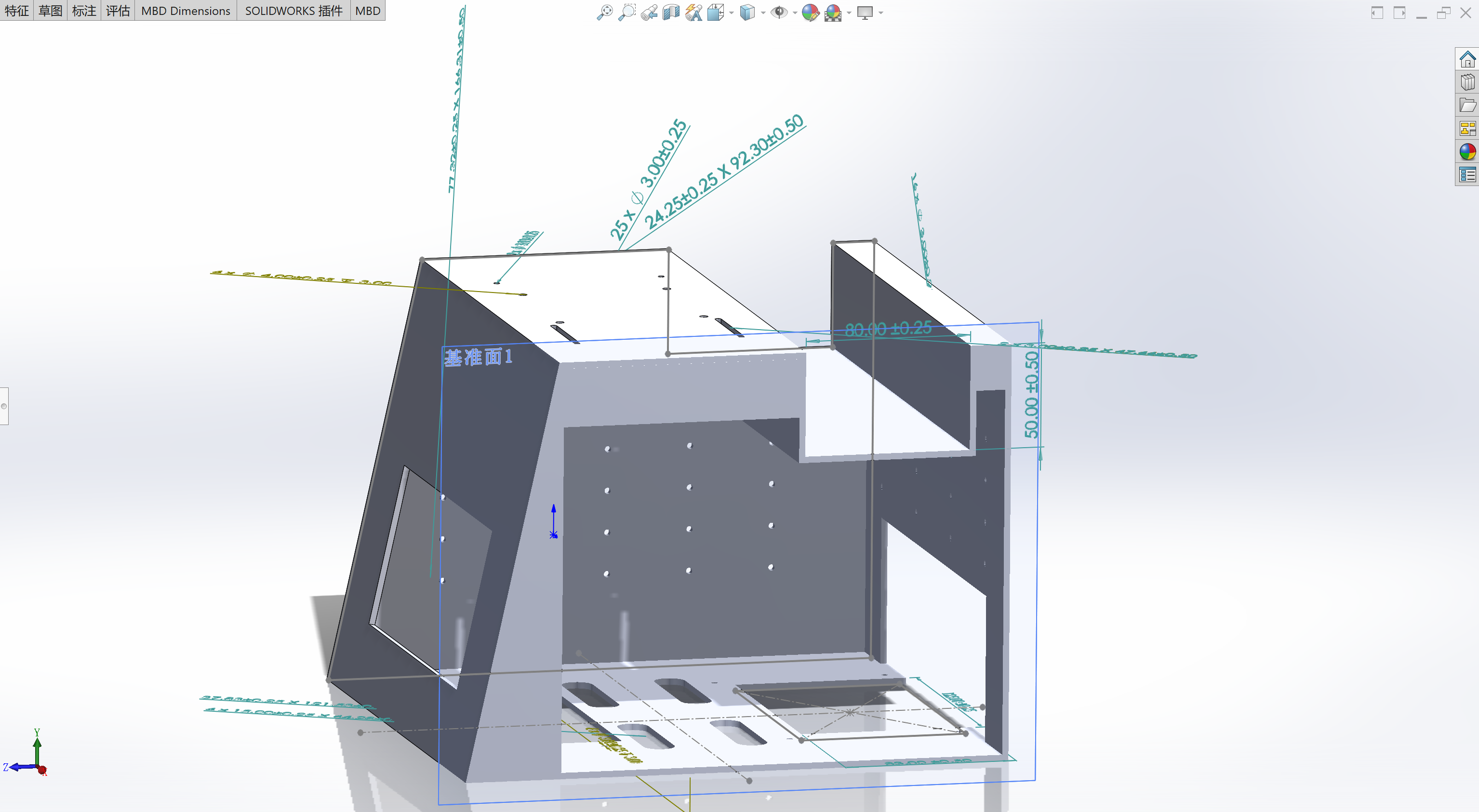
考虑到采摘机器人是在有坡度的田野中运动的,所以选购了成熟的高性价比方案,选购了现成的履带小车底盘,这样就可以减少硬件方面花费的时间,只需要根据履带小车底盘尺寸设计的小车箱体,加上机械臂就可以实现基础操作了。方案也是使用stm32f1单片机为下位机,Raspberry Pi树莓派为上位机。
初稿(自主设计)
因为使用stm32f1单片机为下位机(负责电机运动控制,电磁巡线,蓝牙通信,OLED显示,ROS等等),Raspberry Pi树莓派为上位机(负责使用openCV进行目标检测,串口机械臂控制,获取各种传感器信息)。
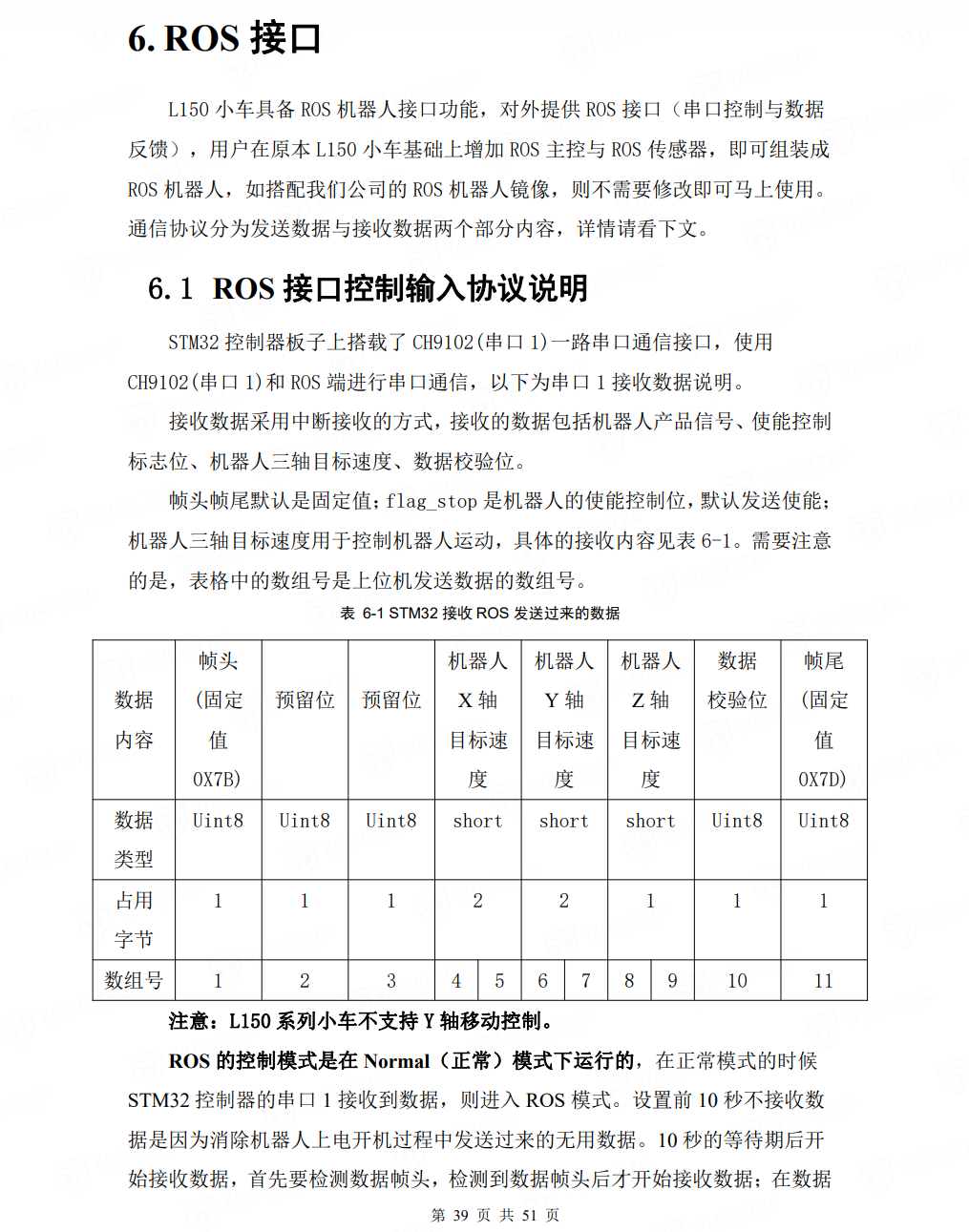
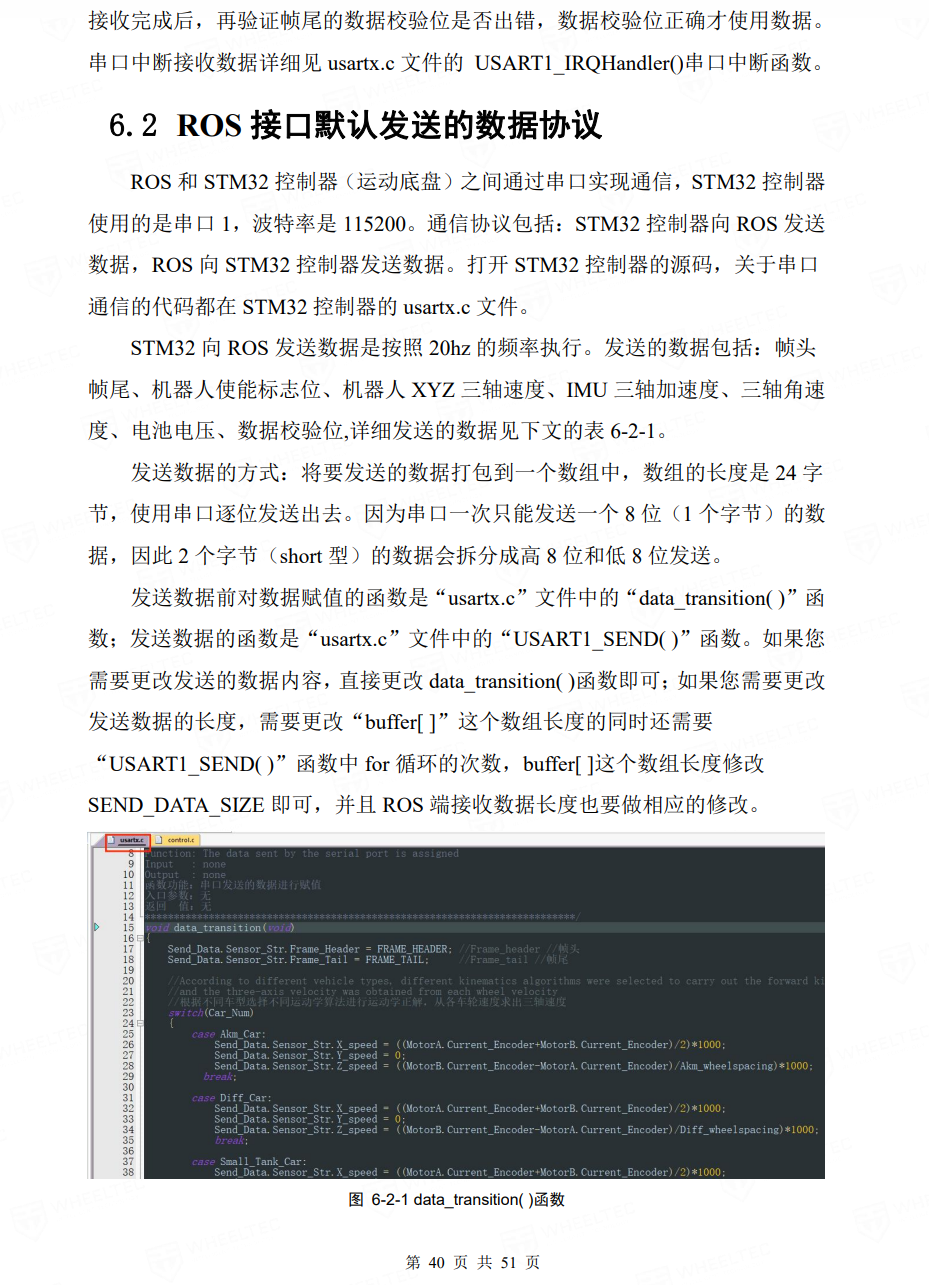
对于我来说最关键的就是搞定上位机和下位机的通信问题,我需要仔细阅读说明文档,思考了很多方法,最终使用了ROS接口,串口发送一定的数据帧格式,主要用来控制小车的运动。
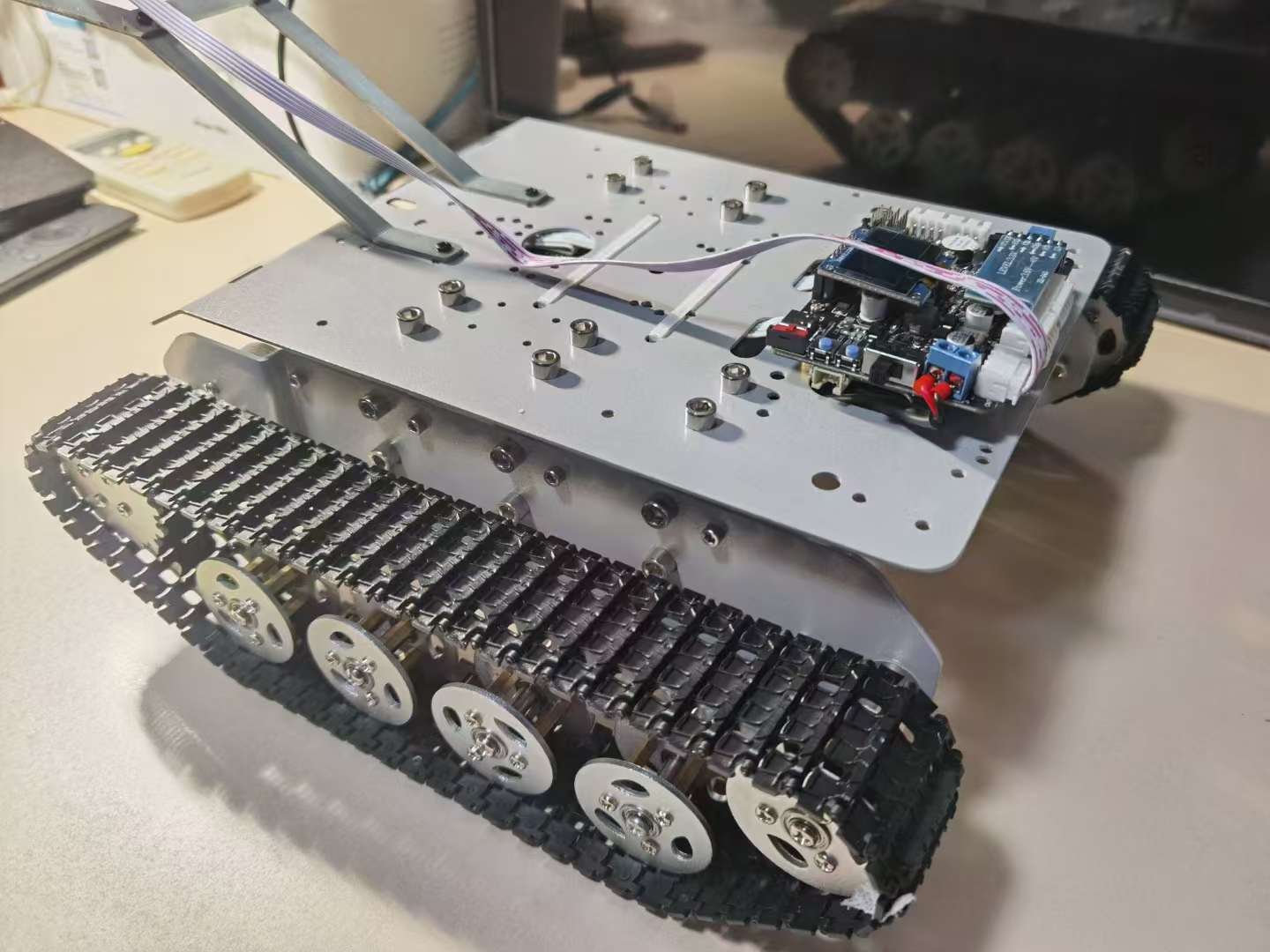
实地测试履带小车的通过坡度的能力,对于不同地形的适应度。

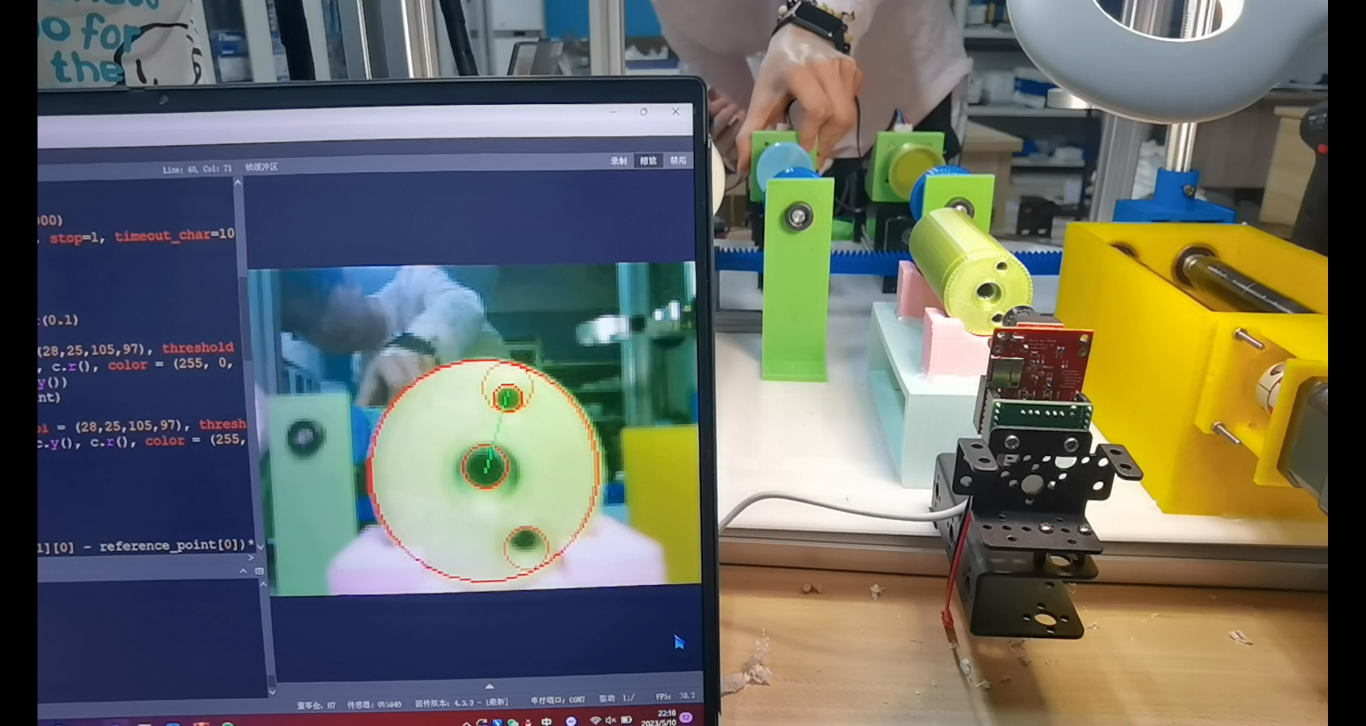
使用单目视觉测量距离,调试中,理论上就是通过摄像头内部参数和物体在所占像素的多少来计算距离。