大二阶段——二十届机械设计竞赛
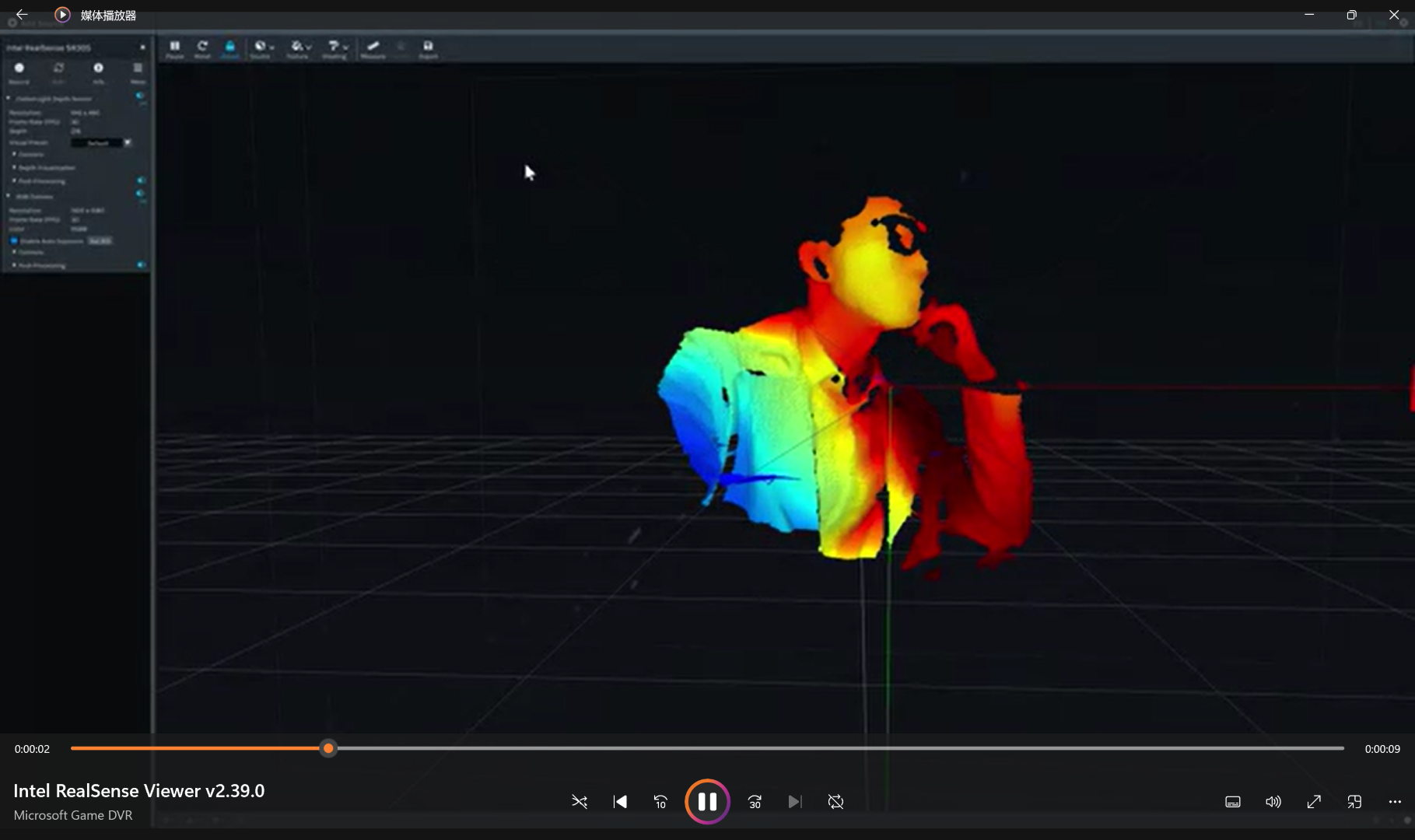
我主动帮助老师解决问题,如何使用RDB-D深度相机识别焊缝的良好程度,顺便参加机械设计竞赛。首先使用了Intel Realsense,目前实现3D sensing 共有三种技术,分别为双目立体成像、结构光和ToF,没有记错的话,当时应该使用了结构光技术,我寻找相关资料时,发现了官网已经停止更新了Intel Realsense SDK相关测试软件,所以我就在全网上搜索,最终在CSDN找到了一个压缩包,其中的软件Intel Realsense SDK可正好可以运行我这个系列模块,我就开始测试了,其实如果有时间我完全可以使用树莓派的ubuntu22.04来运行测试软件实现总体控制。
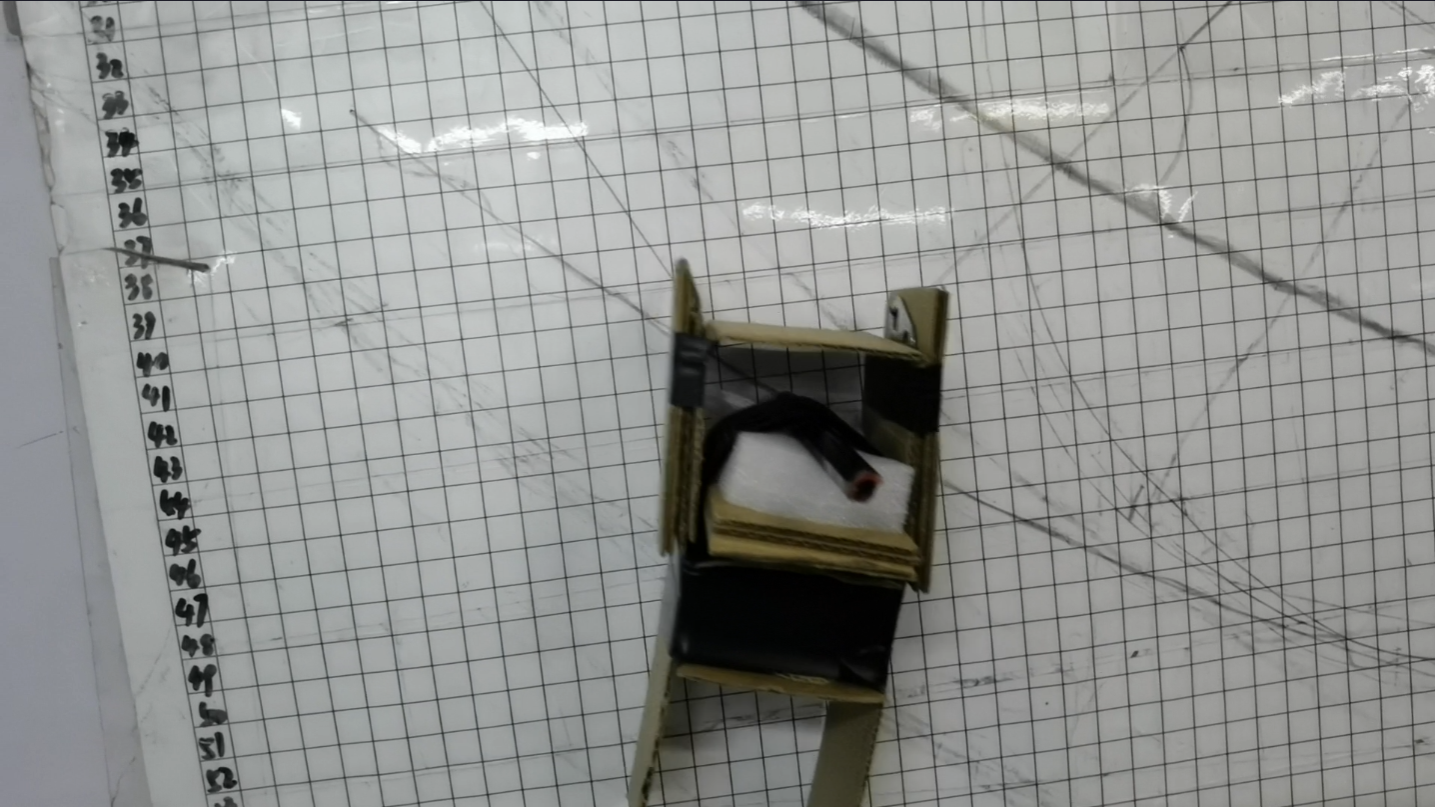
以下是测试图片

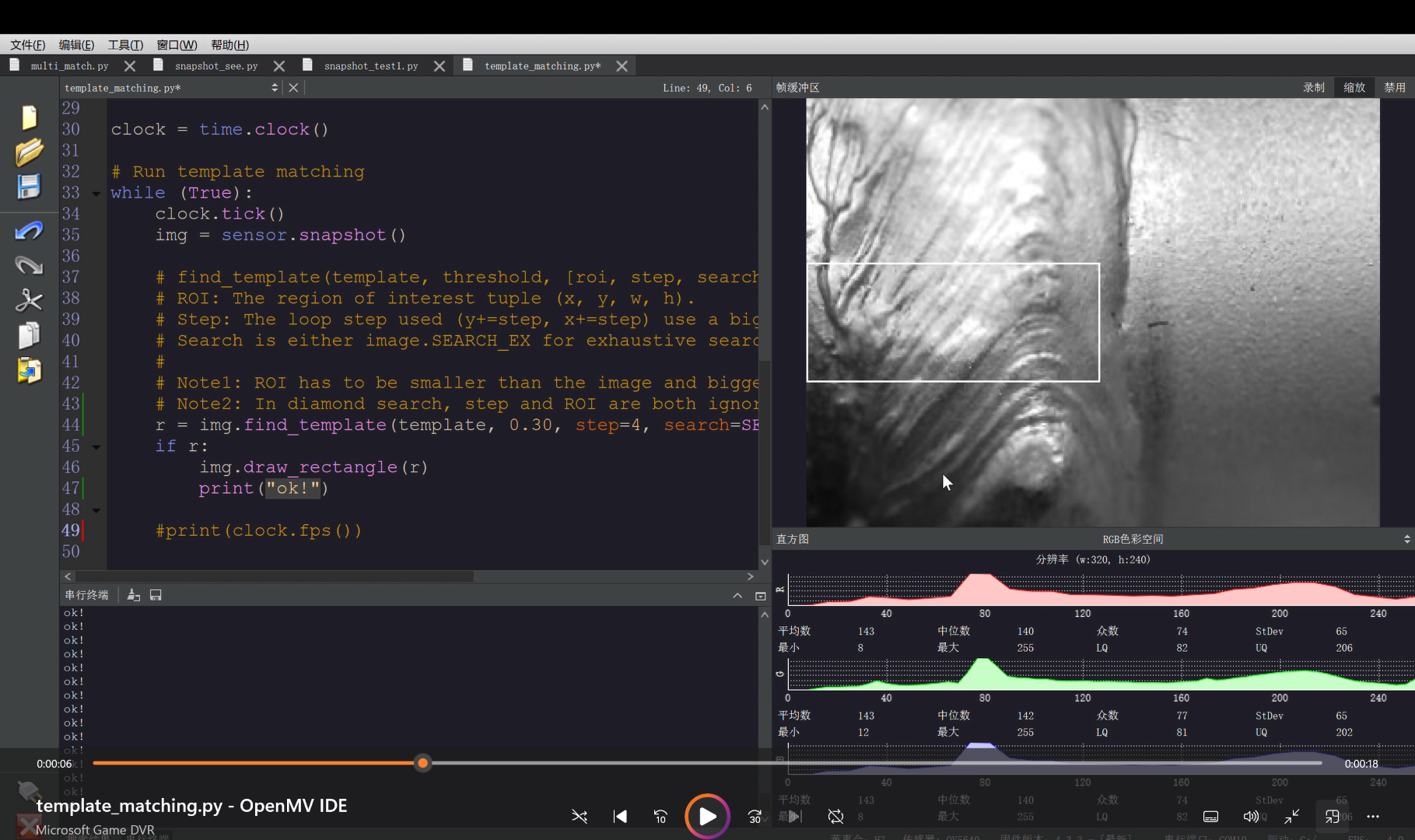
因为Intel Realsense的RDB-D深度相机的精度只有±1mm左右,所以达不到检测焊缝的要求,所以我就使用了openMV plus4 加上了特别短焦摄像头,可以检测微小的物体,我开创性的使用了模板匹配相关算法,成功实现了正常焊缝的检测。
感觉是光学原理课程的实践


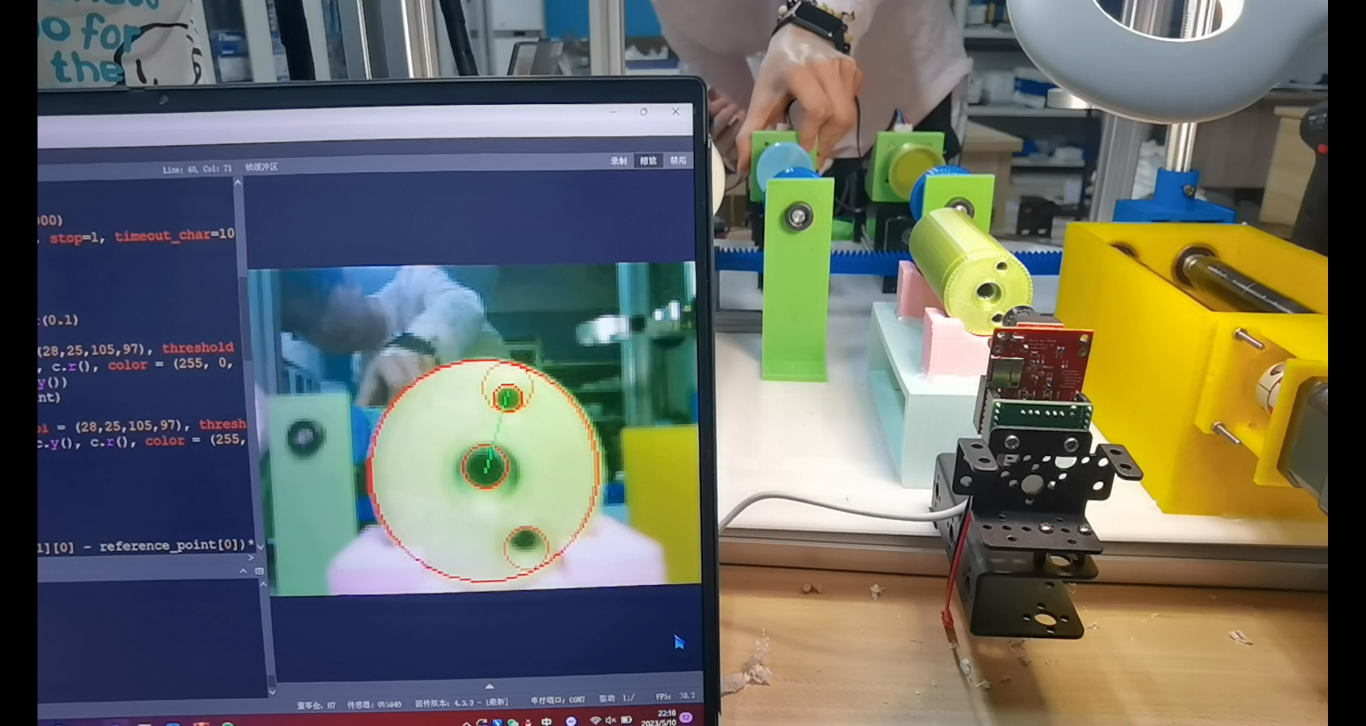
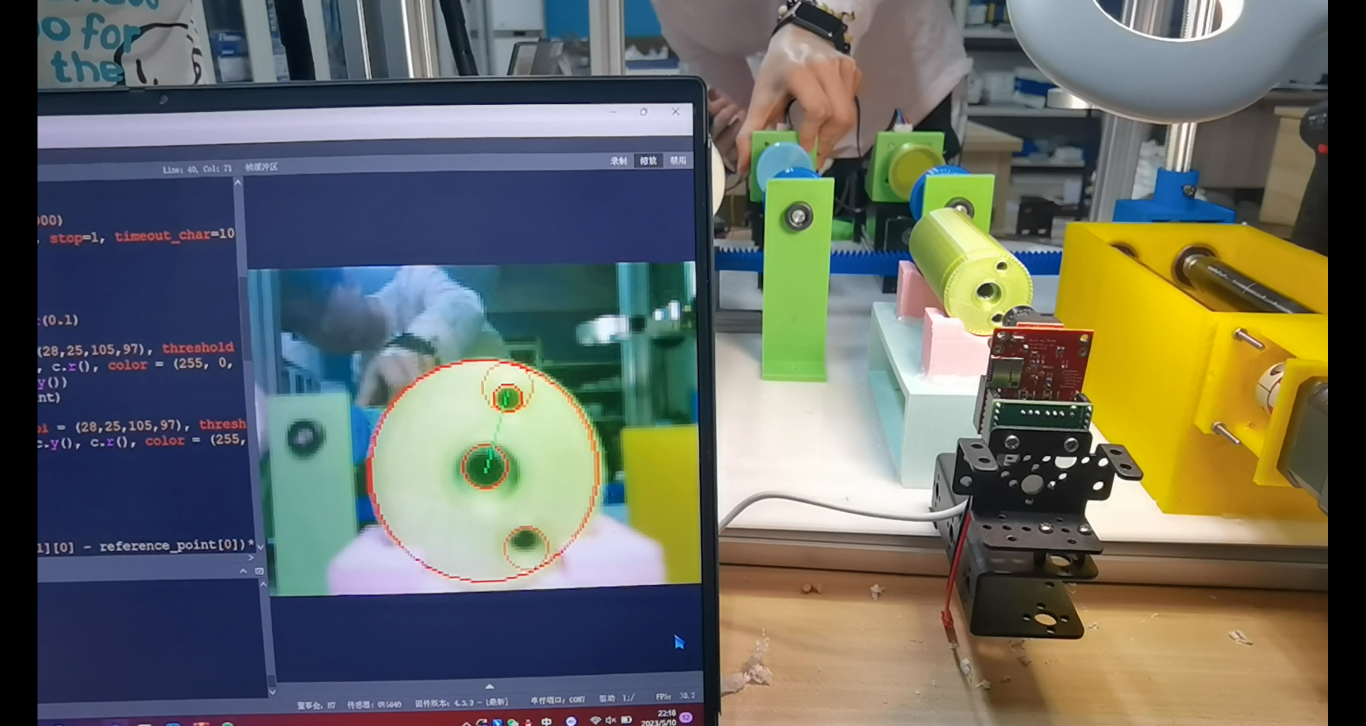
老师其实还有一个任务:测量有两个圆孔的圆柱零件的旋转角度。

比赛前期:团队成员在组装检测机构,我就安装并且调试了摄像头检测模块。我学到了很多机械设计相关内容,很有感觉,特别是3D打印和零件装配的结合和设计思路。