大一阶段任务——悬挂运动控制系统
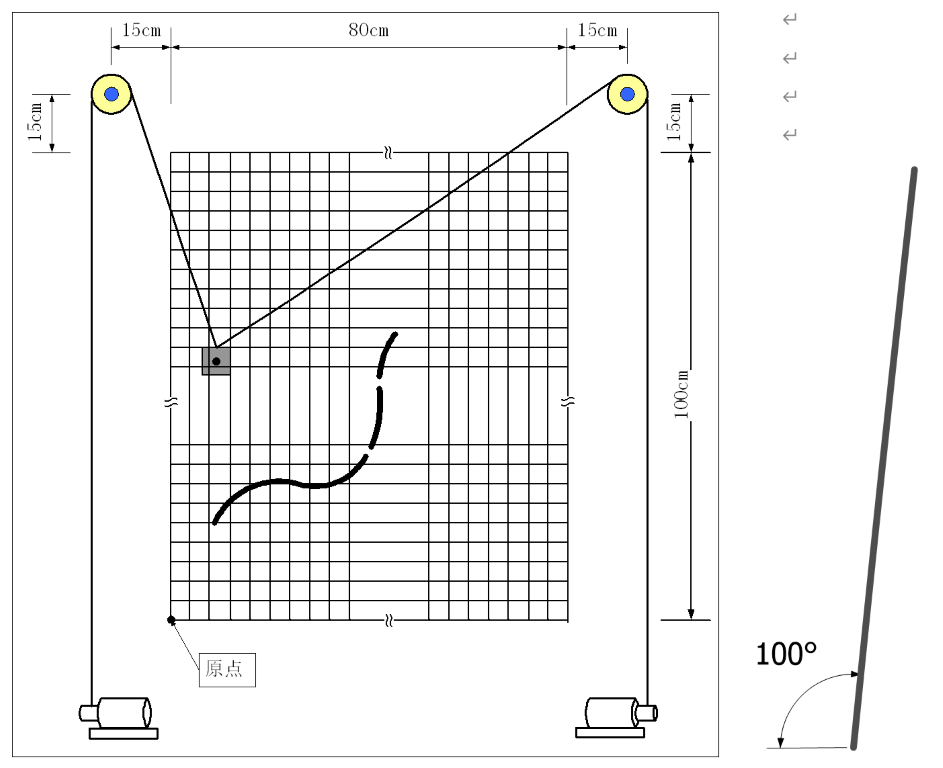
任务:设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。物体的形状不限,质量大于100克。物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。
这些装置都是纯手工搭建的,当时是使用了stm32f103c8t6作为主控,自己编写程序,这是也刚刚接触keil和STM32CubeMX等等软件,在刚刚进入大学的时候一切都是挑战,有很多东西需要学习。
大学第一次接触步进电机,学习了步进电机的原理自己编写程序完成了运转