大二阶段——校赛任务
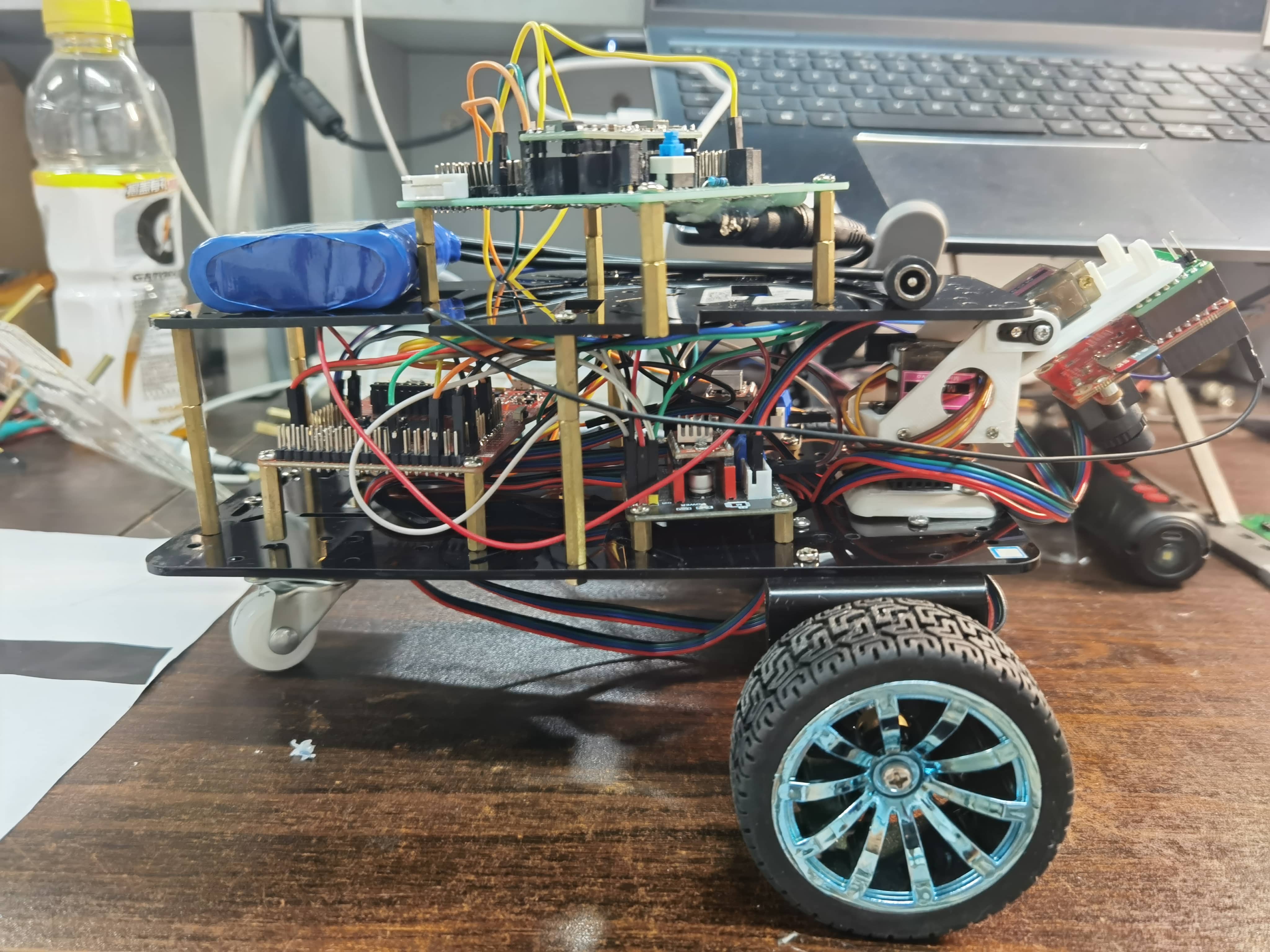
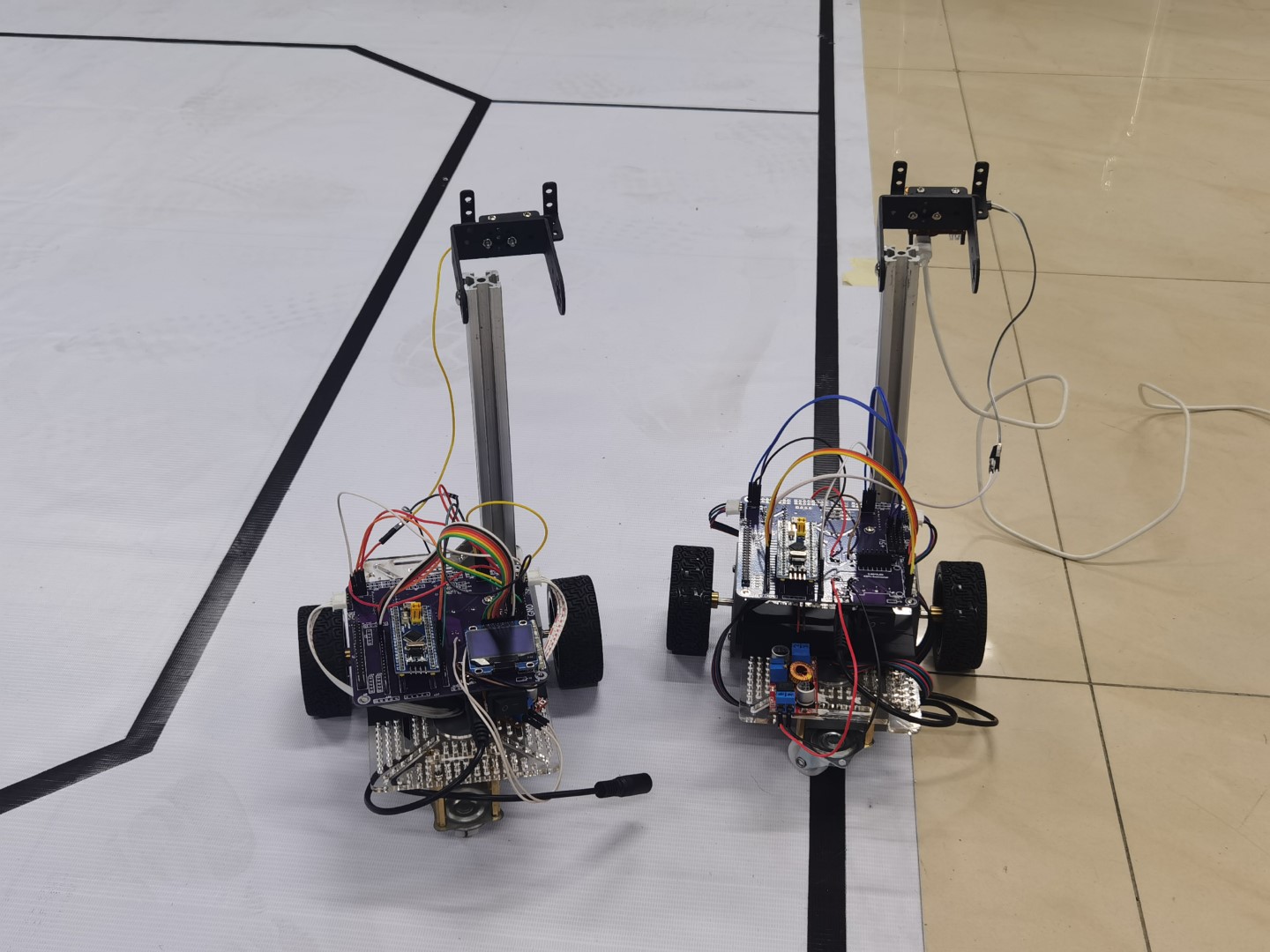
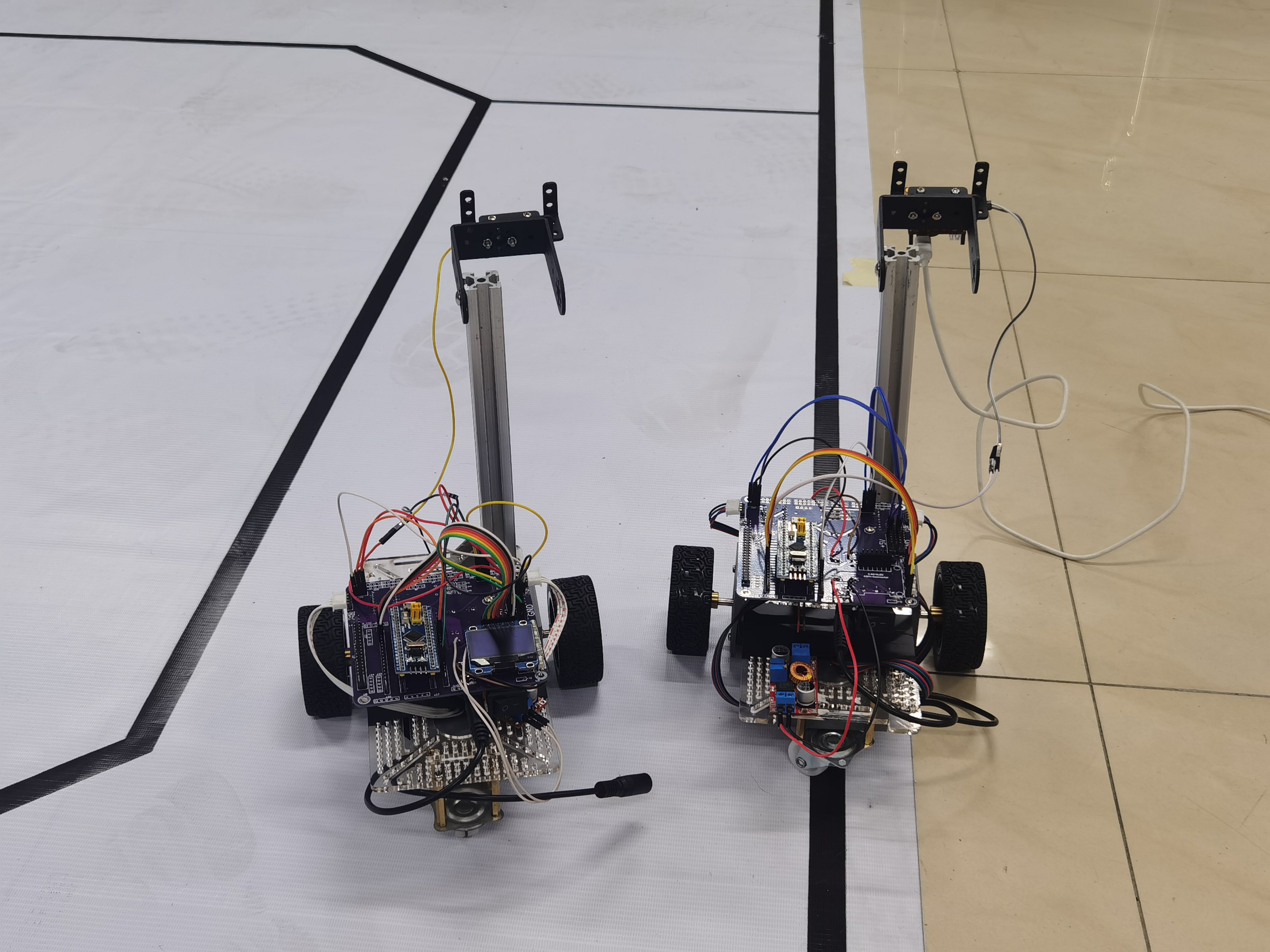
对于这个比赛,一般的同学都只使用红外循迹模块来完成任务,但是我觉得既然特斯拉可以使用纯视觉实现L2级别自动驾驶,我觉得在这次比赛中是否可以使用强大的openMV来实现小车在“道路”上自动行驶,而且可以更好探索发现openMV的新功能(二值化巡线,模板匹配,边缘检测,神经网络等等)。
不仅是软件方面功能的选择,而且对于摄像头安放的高度和角度,外部的光线条件都有很严格的要求。
其中我们使用了选定像素点对于黑色(ROI)的检测,当经过黑线时,会触发那一个像素点,从而可以使flag标志位置一,还可以记录标志位累积触发数。
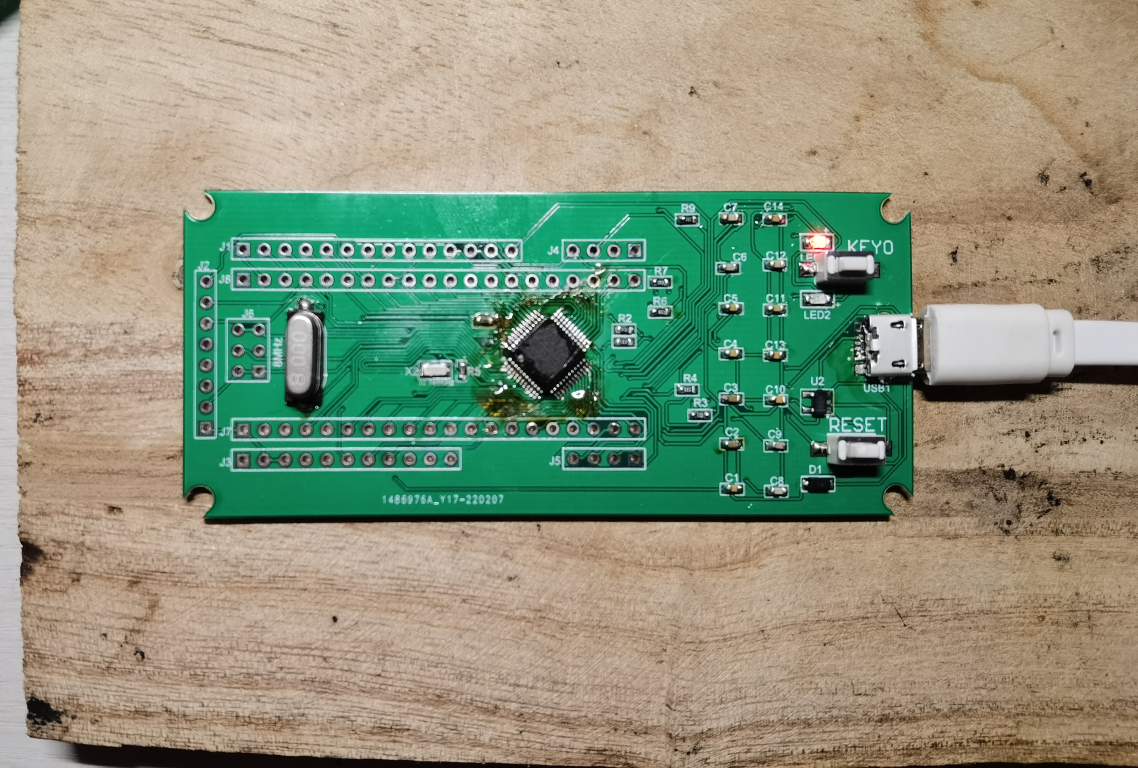
调试过程
最终效果