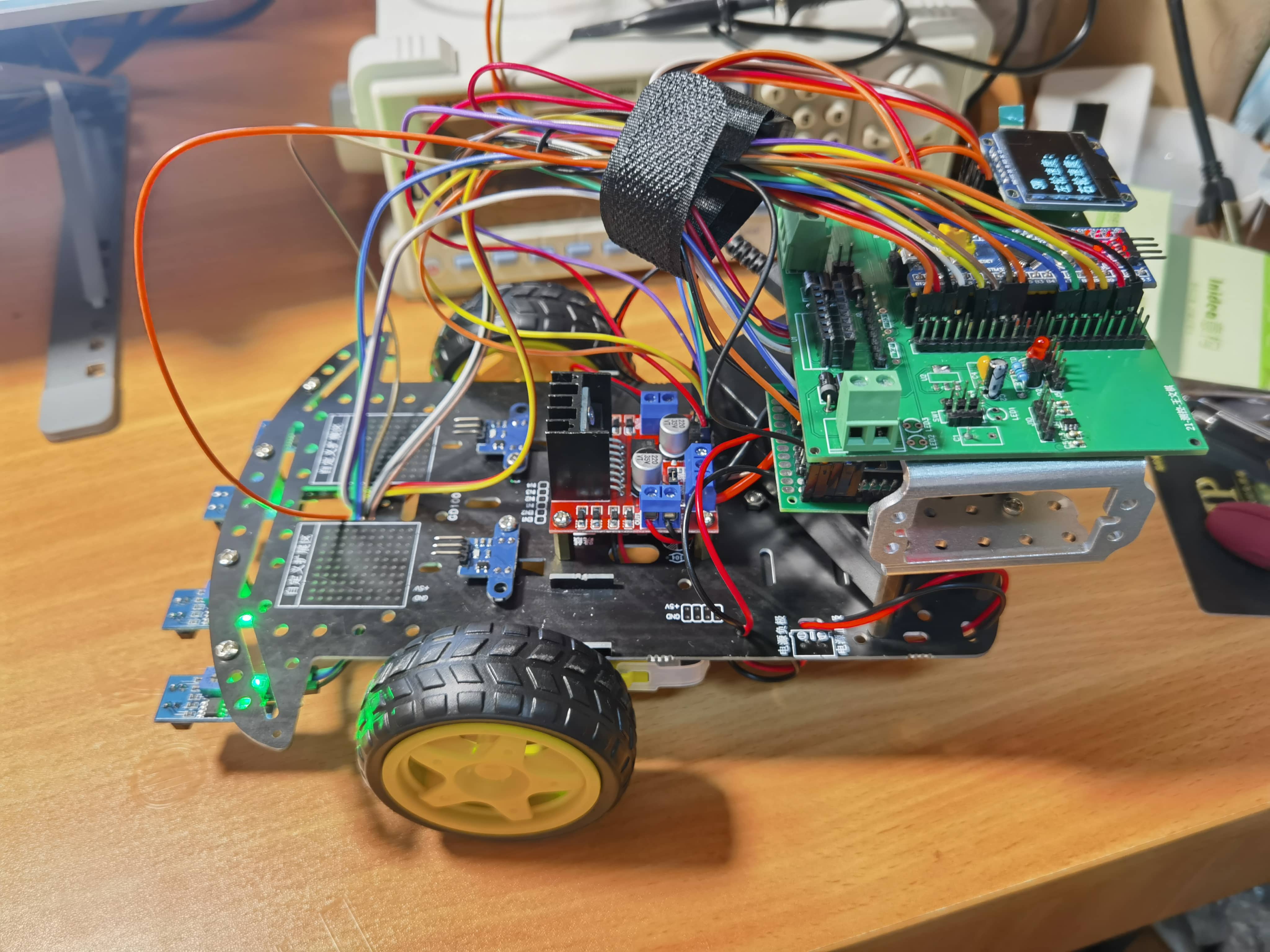
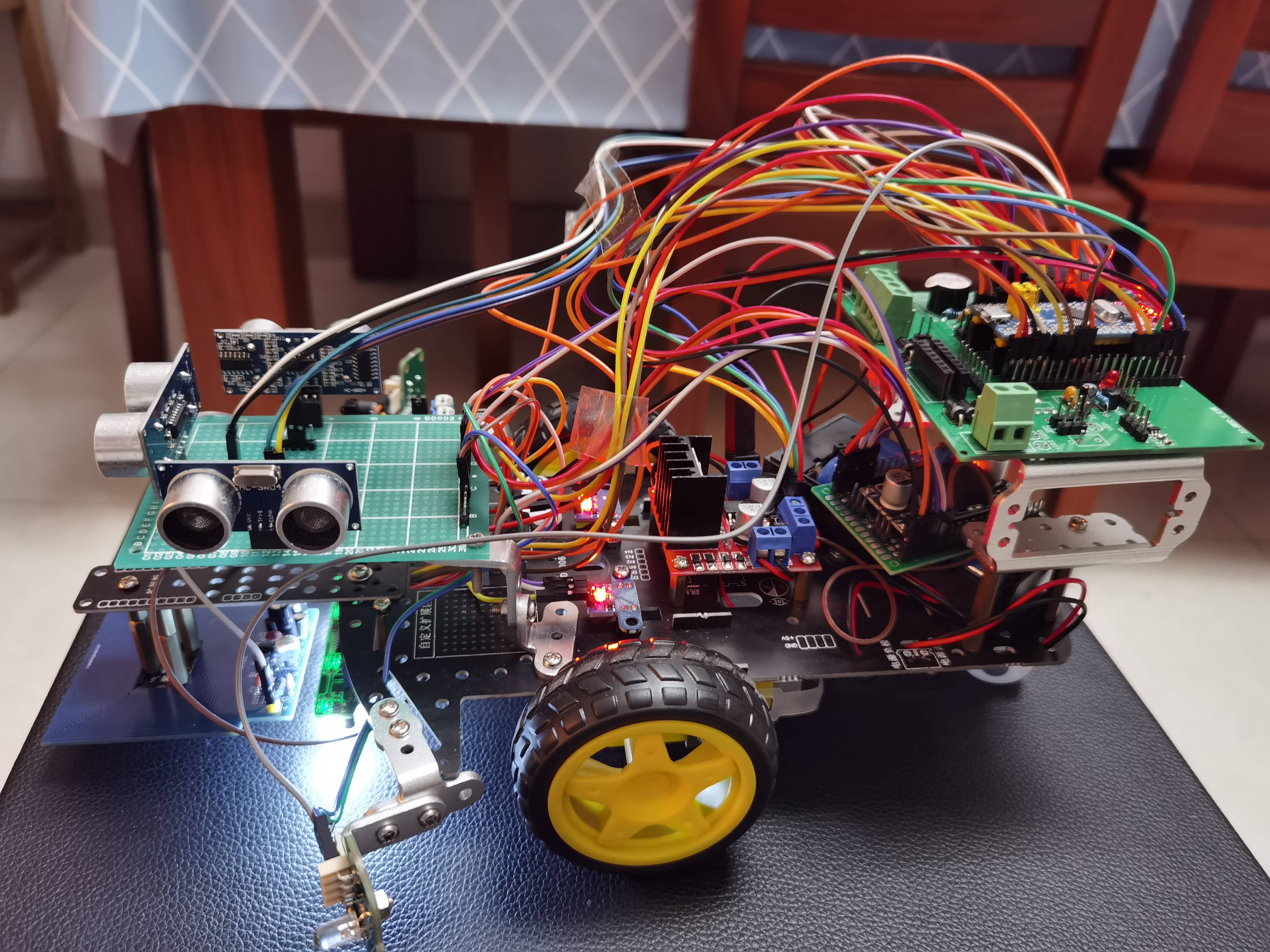
从大一开始的自动循迹小车改进过程
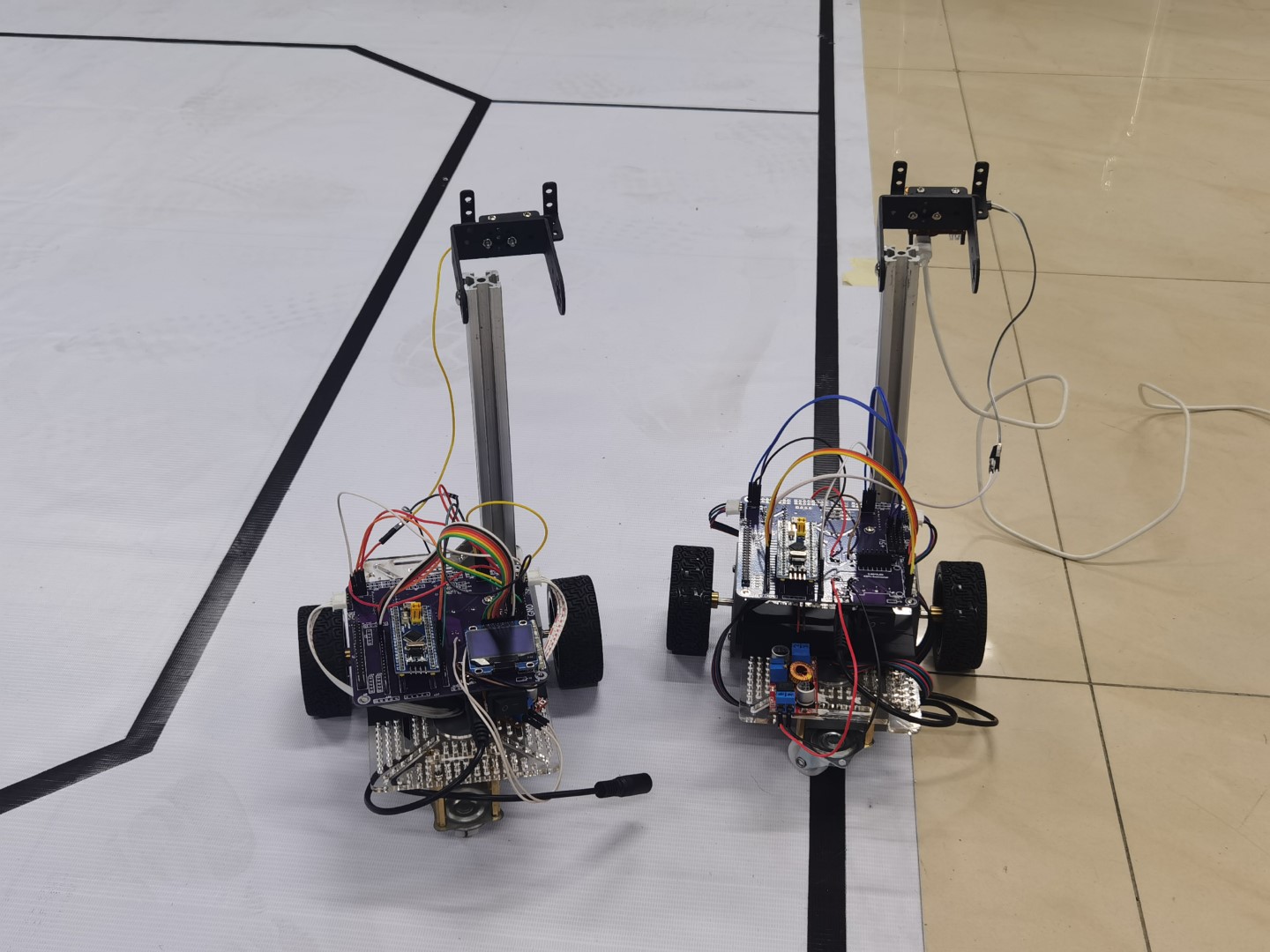
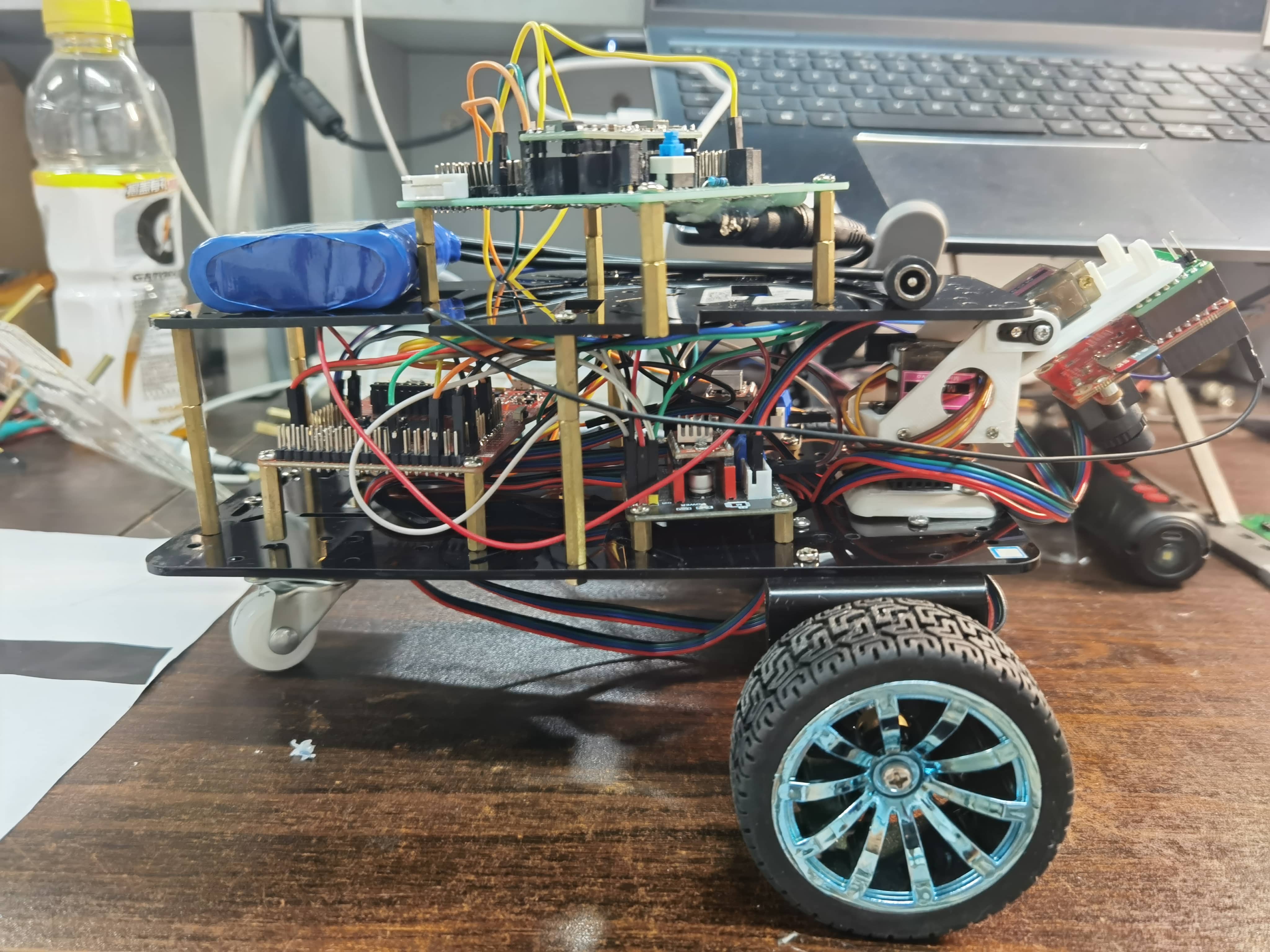
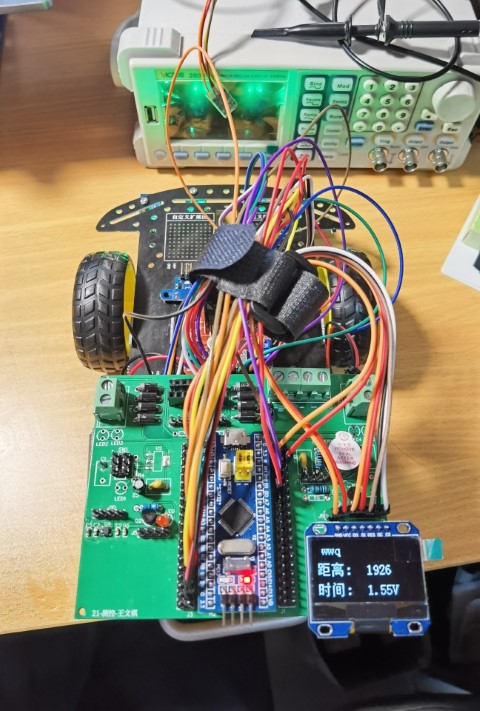
自主设计基于stm32f103c8t6最小系统板的智能巡线小车
要求:
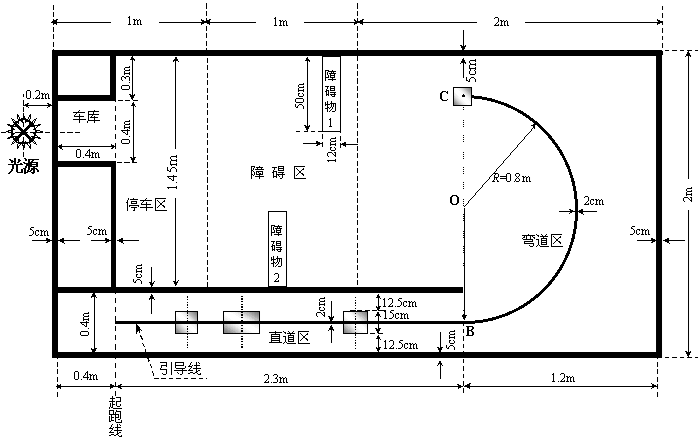
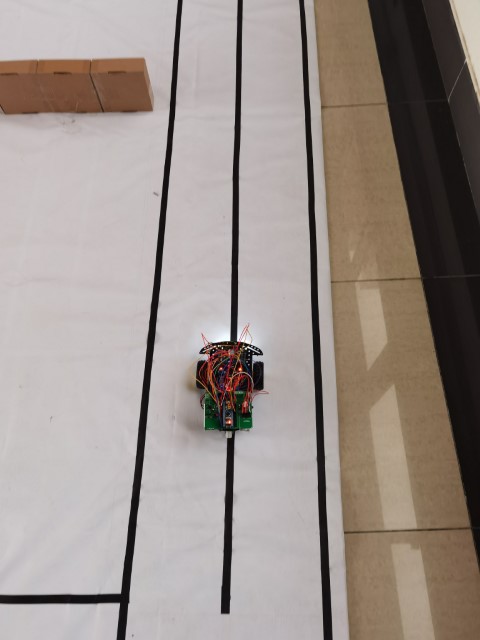
(1)电动车从起跑线出发(车体不得超过起跑线),沿引导线到达B点。
(2)电动车到达B点以后进入“弯道区”,沿圆弧引导线到达C点(也可脱离圆弧引导线到达C点)。在C点检测到一条黑色的横线,停下小车。
(3)电动车通过障碍区进入停车区并到达车库。电动车必须在多个障碍物之间通过且不得与其接触。
(4)电动车完成上述任务后应立即停车,但全程行驶时间不能大于90秒,行驶时间达到90秒时必须立即自动停车。

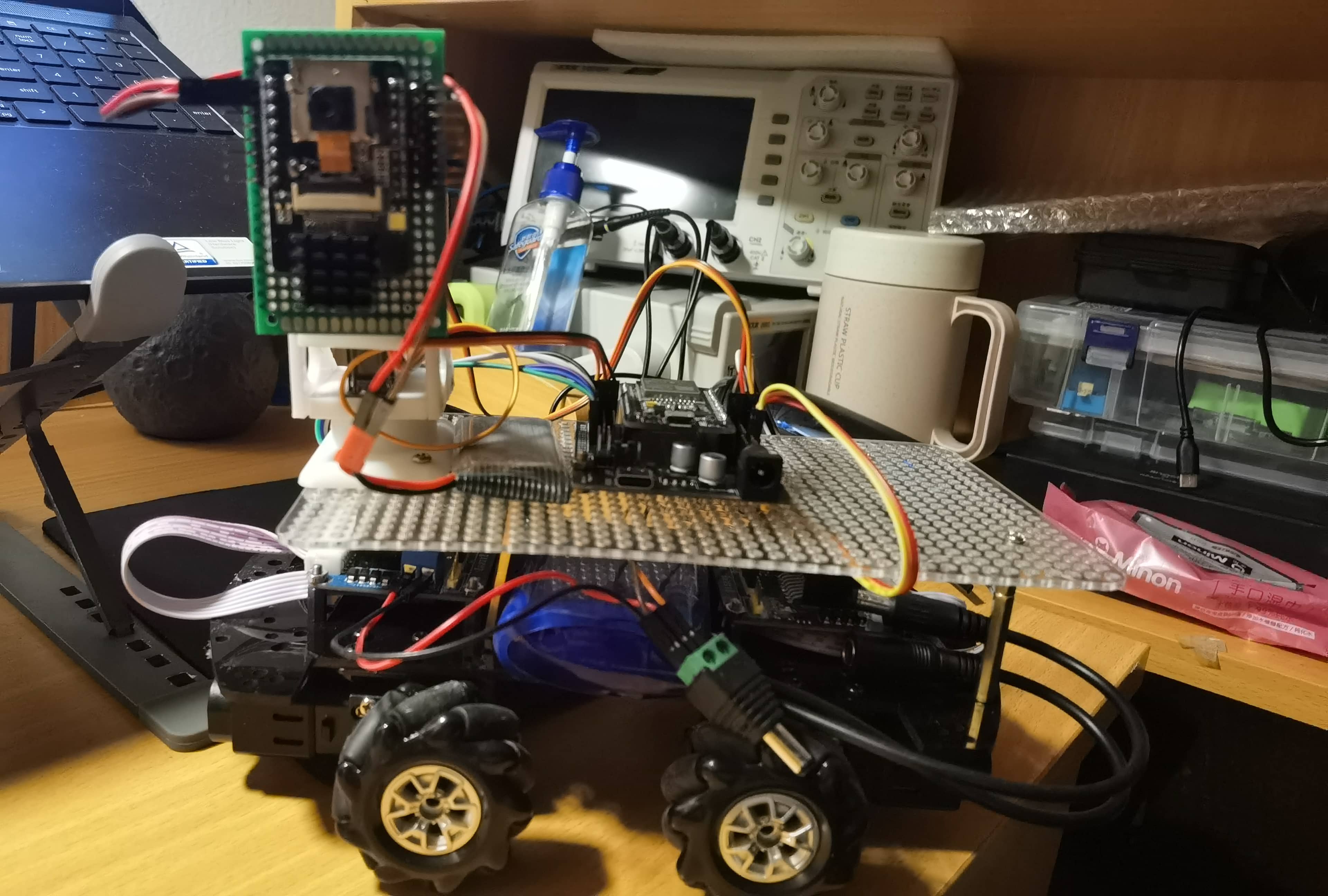
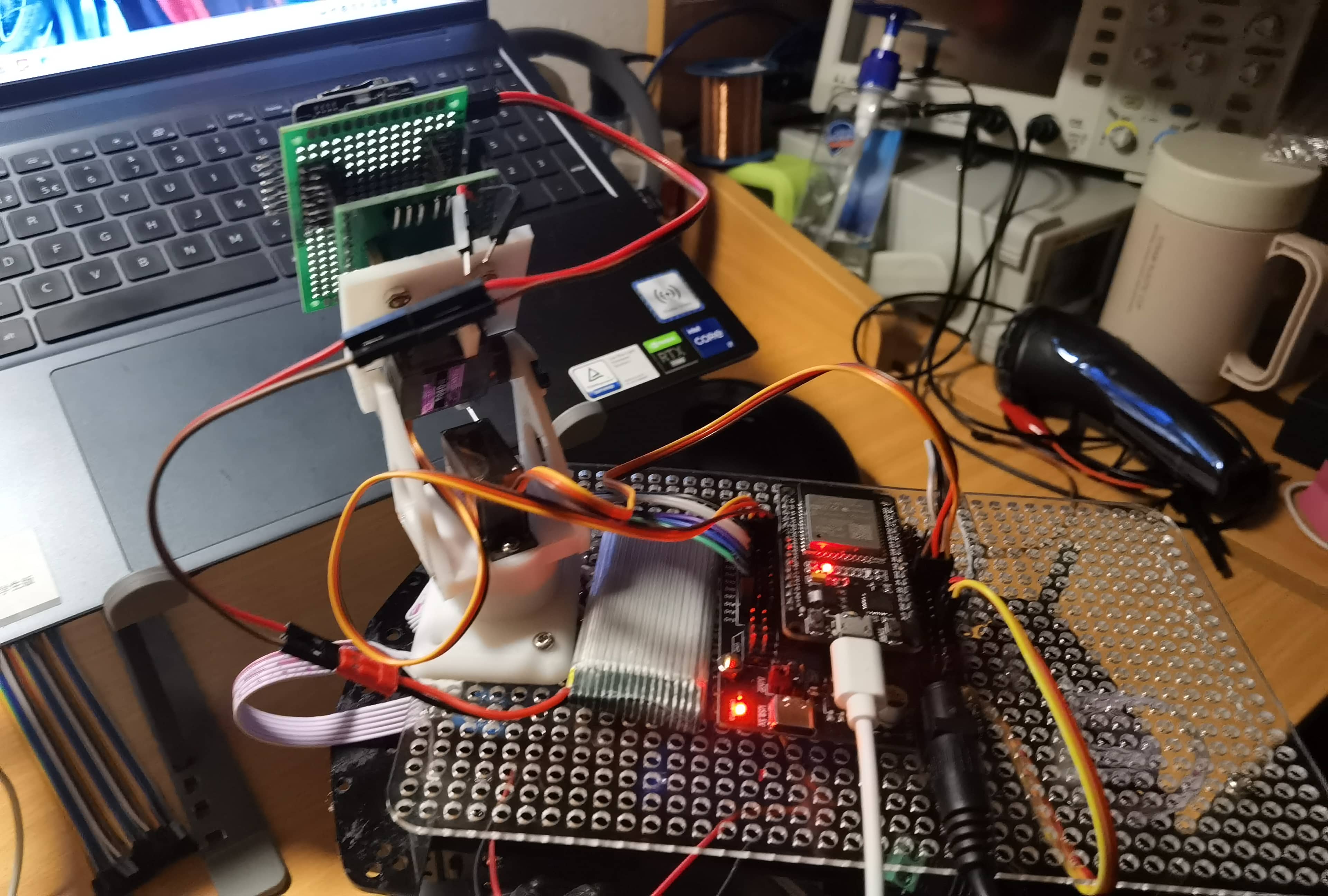
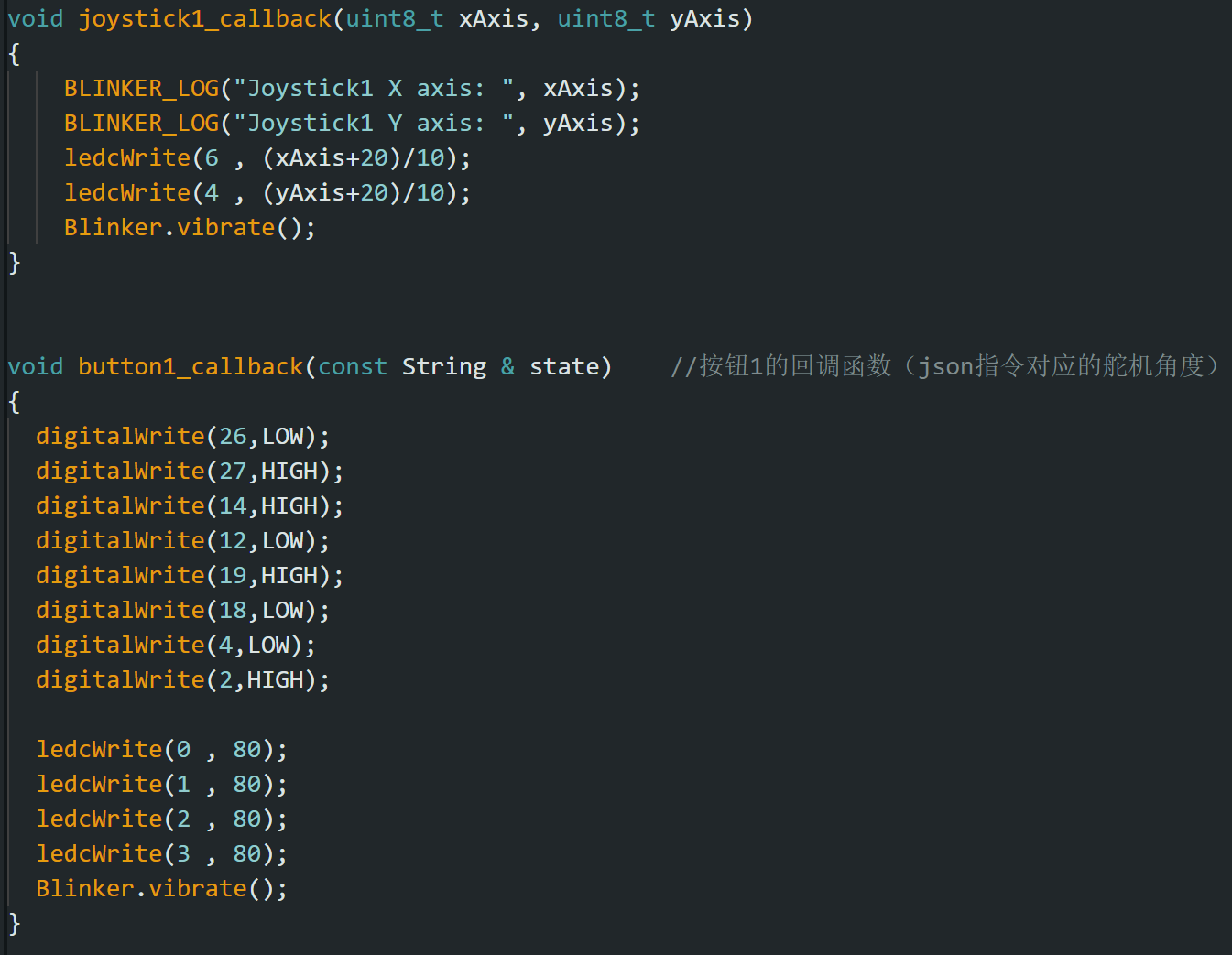
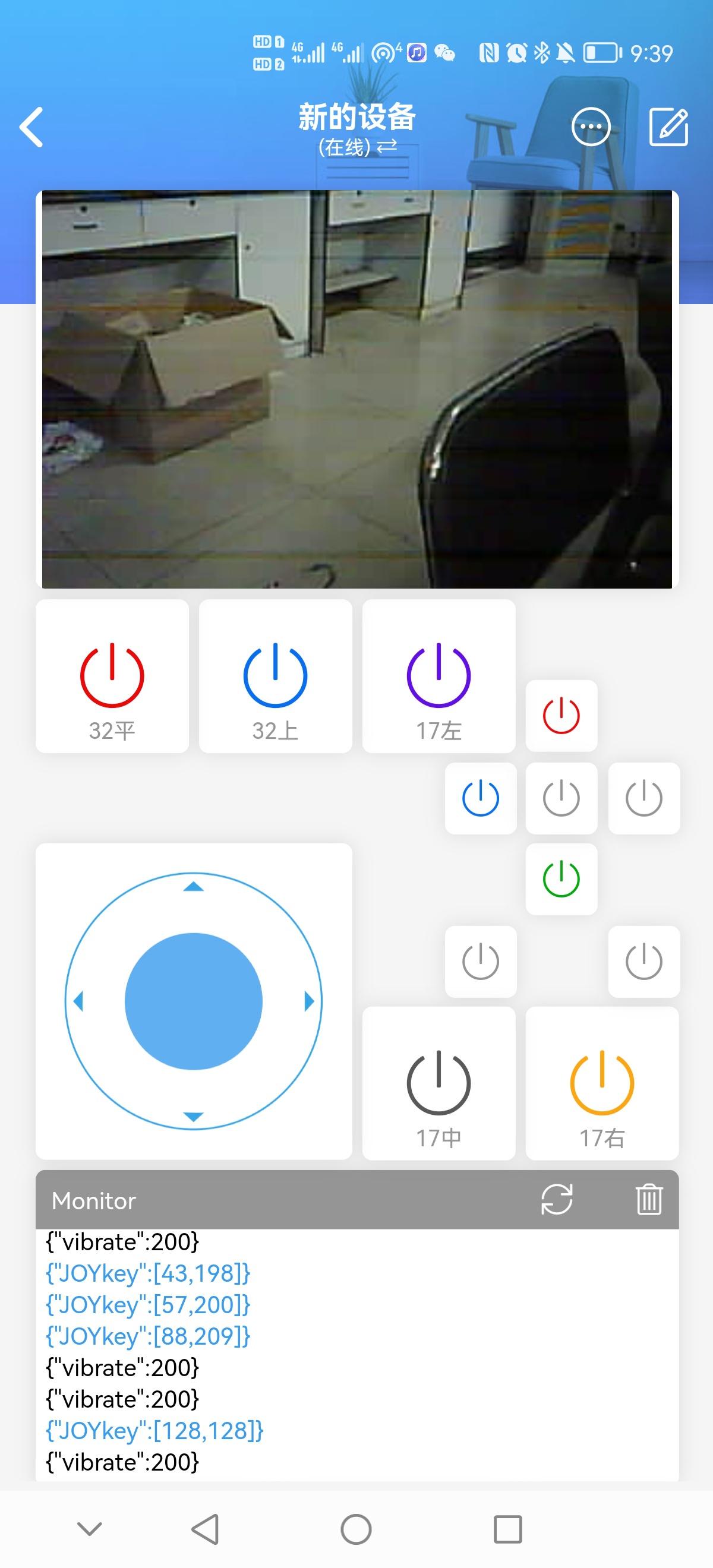
自己DIY的一个可以通过手机APP来控制运动和摄像头移动的小车,主要使用了esp32和esp32-cam主控,通过点灯binkerAPP实现内网穿透,使用了arduino IDE编写相应代码,参考了blinker网站的各种回调函数,主要用于通过自主设定按键回调函数完成相应的操作,比如小车的前后左右运动和摄像头的不同角度观察。